


Перспективы применения беспилотных летательных аппаратов для устранения технологических нарушений в условиях подземного рудника
 Дьячков П.С.
Дьячков П.С.
Институт горного дела Уральского отделения Российской академии наук, г. Екатеринбург, Российская Федерация
Горная Промышленность №5S/ 2025 p. 115-119
Резюме: Представлен анализ вариантов применения беспилотных летательных аппаратов (БПЛА) для решения проблем, связанных с ликвидацией зависаний рудной массы при очистной выемке запасов маломощных крутопадающих рудных тел системой разработки с магазинированием руды либо в дучках и рудоспусках при технологических схемах освоения месторождений с различными горно-геологическими условиями. Обращено внимание на то, как зависания руды влияют на показатели разработки месторождений полезных ископаемых, такие как показатели безопасности ведения работ, потери руды, а также интенсивность и скорость освоения месторождения. Описаны традиционные способы устранения зависаний, указаны особенности их применения и недостатки. Приведены области применения БПЛА в горном деле, а также примеры положительного опыта использования радиоретрансляционной сети для ведения горных работ без прямого визуального контакта с оператором. Предложен способ ликвидации зависаний пород путём доставки взрывчатого вещества при помощи БПЛА. Указаны условия, при которых можно добиться точного позиционирования взрыва перед детонацией. Разработаны и представлены схемы применения БПЛА при ликвидации зависшей рудной массы в рудоспусках, а также при системах разработки с магазинированием руды. Решения, представленные в статье, направлены на создание безопасных условий ликвидации зависаний пород и рудной массы и интенсификацию процесса выпуска руды из очистного пространства или рудоспусков.
Ключевые слова: зависание руды, система разработки с магазинированием, рудоспуск, БПЛА, ретранслятор, взрывное воздействие, безопасность труда, электронный детонатор
Благодарности: Исследования выполнены в рамках Госзадания №075-00410-25-00. Г.р. № 1022040200004-9-1.5.1. Тема 1 (2025–2027).
Для цитирования: Дьячков П.С. Перспективы применения беспилотных летательных аппаратов для устранения технологических нарушений в условиях подземного рудника. Горная промышленность. 2025;(5S):115–119. https://doi.org/10.30686/1609-9192-2025-5S-115-119
Информация о статье
Поступила в редакцию: 13.08.2025
Поступила после рецензирования: 06.10.2025
Принята к публикации: 17.10.2025
Информация об авторах
Дьячков Павел Сергеевич – аспирант, младший научный сотрудник лаборатории подземной геотехнологии, Институт горного дела Уральского отделения Российской академии наук, г. Екатеринбург, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Введение
Кругопадающие жильные месторождения с малой мощностью рудных тел характеризуются весьма сложными горно-геологическими и горнотехническими условиями. Малая мощность рудного тела в совокупности с её изменчивостью и извилистостью контакта рудного тела и вмещающих пород как по падению, так и по простиранию приводят к ситуации, в которой применение высокоэффективных систем разработки на основе производительного самоходного оборудования, таких как этажно-камерная и подэтажных штреков – практически невозможно [1]. Поэтому весьма широкое применение в рассматриваемых условиях имеет система разработки с магазинированием руды, при которой технологические операции по бурению и заряжанию шнуров производятся горнорабочими при помощи переносного оборудования непосредственно в очистном пространстве с поверхности замагазинированной руды. В этой связи весьма важным является вопрос обеспечения безопасности труда [2].
Заклинивание кусков рудной массы приводит к ее зависанию в очистном пространстве, следствием чего является ухудшение условий безопасности горных работ, снижение интенсивности технологических процессов, рост простоев погрузочно-доставочного и транспортного оборудования. Известно, что при отработке маломощных рудных тел системой с магазинированием руды потери в результате зависаний рудной массы в очистном пространстве в отдельных случаях достигают 8–10% [3]. Также проблема зависаний наблюдается при выпуске руды через дучки и во время перемещения рудной массы на откаточные горизонты с использованием рудоспусков [3]. В отдельных случаях зависания приводят к полному выведению выработки из дальнейшей эксплуатации, будь то выработки выпуска руды на очистной выемке или рудоспуски [4].
Все вышеуказанное приводит к комплексному снижению эффективности и безопасности подземной геотехнологии. Таким образом, разработка способов ликвидации зависаний рудной массы при технологиях с присутствием людей в очистном пространстве и использованием для перепуска руды на откаточные горизонты рудоспусков – является актуальной научно-практической задачей.
Анализ опыта и изыскание перспективных технических решений
Зависание кусков руды как явление представляет собой свод статического равновесия. К наиболее распространённым способам устранения зависаний можно отнести воздействие энергией взрыва на некоторый объём горной массы, который является причиной заклинивания пород в узком пространстве, и вывод их из устойчивого состояния. И Ф Медведев предложил два способа ликвидации зависания с применением энергии взрыва: разрушением одного из кусков, слагающих зависание, что вызывает перемещение остальных кусков, и перемещением одного куска относительно других с помощью фугасного (встрахивающего) действия взрыва [5; с. 47].
Самым распространённым способом ликвидации зависания является метод, подразумевающий применение накладных зарядов. Известны также такие способы, как бурение и взрывание скважины, заложенной параллельно расположению выпускной выработки, бурение скважины и доставка BB к устью заклинивания рудной массы. Несмотря на широкое применение перечисленных способов каждый из них негативно влияет на состояние и устойчивость массива горных пород, в котором располагается выработка и ведутся работы, что обусловливает изменение эффективности и срока эксплуатации рудника.
Помимо этого, известны способы ликвидации зависаний руды без применения бурового оборудования, например, путём доставки взрывчатого вещества пороховой установкой [5; 6] или детонацией заряда, который прикреплён к концу шеста [7]. Также задокументированы способы без использования энергии взрыва, например, с применением подвижных секций, приводимых в движение пневмобаллонами, регулирующих сечение рудоспуска и расширяющих его в участке зависания [8]. Однако эти способы отличаются повышенным травматизмом, обусловленным необходимостью нахождения человека в опасной зоне, а применение секций сопряжено с повышенными затратами.
Круг инженерных и научных задач, решаемых с помощью БПЛА в различных видах деятельности, с каждым годом растёт, и горная промышленность не стала исключением несмотря на жёсткие условия их применения. Отличительной особенностью применения БПЛА является гибкость эксплуатации ввиду малых габаритов и веса [9]. Запускаемые в недоступные для человека зоны БПЛА могут собирать информацию о состоянии горных выработок, рудничной атмосферы, переносить оборудование.
Интересный опыт постановки и решения задач при использовании БПЛА предоставили учёные из университета Guilin University of Technology, применив возможность летательных аппаратов нести на себе полезную нагрузку. Предложенное изобретение представляет собой летательный аппарат с заменяемыми модулями, среди которых есть буровое и инъектирующее оборудование, комплекс которого выполняет работы для обеспечения безопасности строительства дорог в горной местности, обрушая, или, напротив, закрепляя отслаиваемые породы [10]. Идея о подобном гибком применении БПЛА доказала своё право на возможность использования в иных условиях.
В настоящее время регистрируется устойчивая тенденция к повышению технологичности процессов на горных предприятиях, которая обусловлена ужесточением требований безопасности труда, экономической эффективности и цифровизации производства [11; 12]. К подобным процессам можно отнести бурение и доставку с применением самоходного оборудования с дистанционным управлением и роботизированных комплексов [13]; отбойку руды из массива горных пород с применением программируемых электродегонаторов; маркшейдерскую съемку с использованием управляемых БПЛА как на поверхности [14], так и в подземных условиях [15].
Для решения задач, связанных с ликвидацией зависаний, наиболее близким по существу к применению БПЛА с зарядом ВВ является применение специальных гранатомётных систем, запускающих реактивный снаряд, детонирующий при контакте с зависанием [16]. Однако одним из недостатков их применения является невозможность управления снарядом и, как следствие, низкая точность их попадания. Также на точность влияет недостаточное качество юстировки (наводки) оборудования, зачастую возникающее из-за выполнения работ в опасной зоне при ограниченном запасе времени.
Разработка способа ликвидации зависаний рудной массы с применением БПЛА
Дистанционно управляемый летательный аппарат, несущий на себе полезный вес в виде взрывчатого вещества, позволяет точно позиционировать заряд перед его детонацией, обеспечивая высокую интенсивность воздействия взрывной волны.
Управление БПЛА является возможным только в условиях прямой видимости передающего и принимающего устройств. Однако эта проблема решается использованием ретрансляторов радиосигнала с технологией LoRa (Long Range) или их последовательной сети. В частности, в работе В.А. Довгаля и К.А. Османи отмечено, что: «Ретрансляция сигнала увеличивает дальность связи дрона на радиус самой связи наземной станции, добавляя свою площадь связи, что позволяет беспилотнику преодолевать более длинные дистанции, чем в случае способа «прямая связь». Режим ретрансляции работает только тогда, когда система не обнаруживает подключение к полетному контролеру БПЛА либо к наземной станции, либо подключена система автономного питания» [17]. Таким образом, оператор может составить маршрут полёта БПЛА вне условий зоны прямой видимости [18; 19] безопасного расстояния от устья выпускной выработки. Формула применения БПЛА для устранения зависаний представлена на рис. 1.
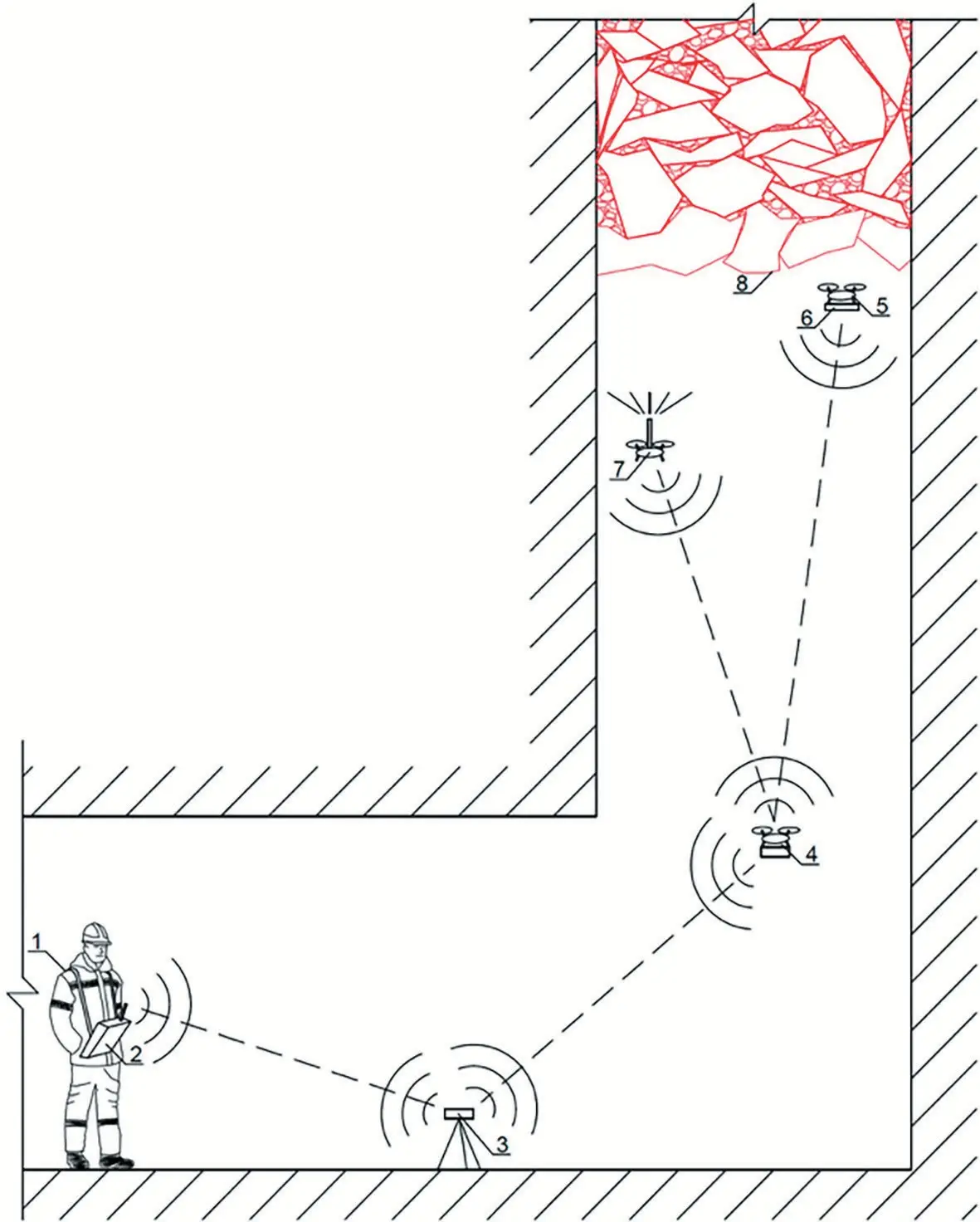
Рис. 1 Схема применения БПЛА при устранении зависаний: 1 – оператор; 2 – пульт управления; 3 – стационарный ретранслятор радиосигнала; 4 – БПЛА с нагрузкой в виде ретранслятора радиосигнала; 5 – БПЛА с нагрузкой в виде ВВ; 6 – заряд ВВ; 7 – БПЛА с нагрузкой в виде источника света; 8 – зависание горной массы
Fig. 1 A schematic view of using UAVs to eliminate hand-ups: 1 – operator; 2 – control panel; 3 – stationary radio signal relay station; 4 – UAV with a radio signal relay station; 5 – UAV with explosive; 6 – explosive charge; 7 – UAV with a light source; 8 – ore hand-up
Контроль над расположением в пространстве БПЛА обеспечивается встроенными средствами позиционирования: камерой, датчиками набора высоты и контроля расстояния до ближайшей преграды. Для предотвращения задевания подвижными элементами конструкции БПЛА бортов выработки используется шарообразный упругий скелетный каркас, выполненный из легковесного материала. Для повышения точности расположения перед детонацией возможно рассмотреть применение второго БПЛА с переносным источником света. Его целью будет являться сопровождение взрываемого аппарата, изображение с камеры которого даст возможность оператору выбрать более выгодную позицию перед детонацией заряда. Перед инициированием взрыва оператору необходимо увести сопроводительные БПЛА из зоны обрушения, при этом оставляя в ней блок ретранслятора для обеспечения связи пульта-бластера с электронным детонатором1 и БПЛА с зарядом ВВ с пультом управления.
Возникающее взрывное воздействие выводит из равновесия заклинившие между собой элементы зависания, что приводит к потере устойчивости и обрушению рудной массы.
Проблема зависаний в подавляющем большинстве случаев наблюдается в условиях, где ширина очистного пространства или конкретной выработки не способствует свободному движению рудной массы. Помимо выпускных выработок, такие условия возникают при применении системы с магазинированием руды.
Несмотря на применяемые меры безопасности при использовании системы разработки с магазинированием руды, такие как запрет на нахождение рабочих в блоке во время частичного выпуска руды, укладывание настила на замагазинированную руду и контроль оседания поверхности отбитой руды в блоке после выпуска, существуют менее явные причины травматизма. К ним относится зависание руды в узком очистном пространстве и образование «скрытых» пустот в отбитой рудной массе, внезапные обрушения которого могут привести к тяжёлым травмам и летальным исходам.
Принимая во внимание непрогнозируемую высоту зависания, запуск БПЛА значительно ускоряет процесс его устранения, позволяя быстрее вернуть блок в эксплуатацию. Ликвидацию зависания при генеральном выпуске руды не представляется возможным провести путём ручной доставки ВВ к месту заклинивания, а проведение дополнительных выработок для начала работ по устранению зависаний при помощи скважинных зарядов значительно повышает стоимость мероприятий. Применение БПЛА обеспечит обрушение зависимых запасов безопасно и экономически эффективно.
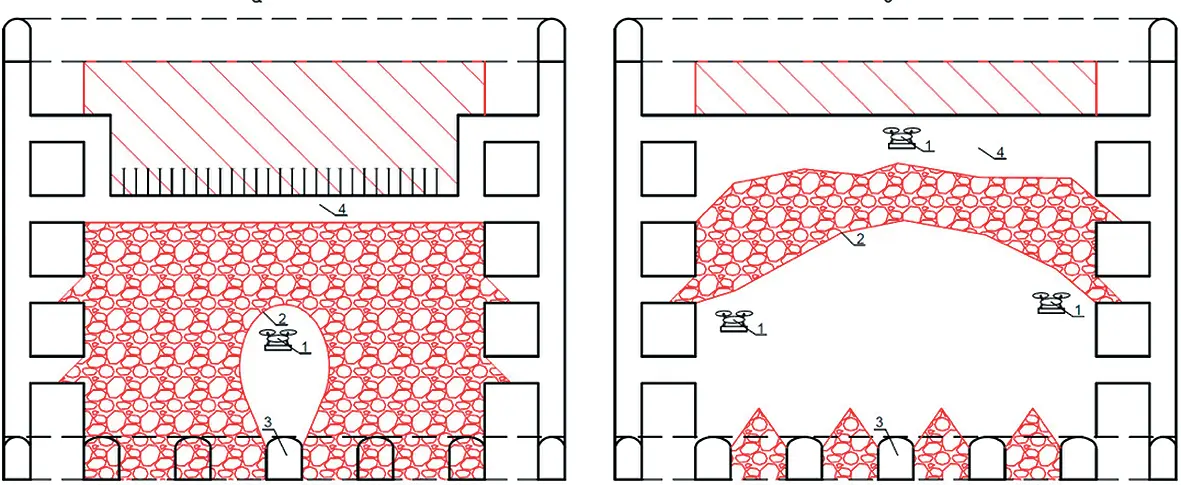
Рис. 2 Схема устранения зависаний при частичном выпуске руды (а), после генерального выпуска руды (б) для системы разработки с магазинированием руды: 1 – БПЛА с нагрузкой в виде ВВ; 2 – зависание рудной массы; 3 – откаточная выработка; 4 – рабочее пространство
Fig. 2 A schematic view of eliminating ore hang-ups during partial ore drawing (a), after general ore drawing (б) for a mining system with ore shrinkage: 1 – UAV with explosives; 2 – ore hang-up; 3 – haulage drift; – stall
На рис. 2 представлены способы устранения зависаний, образующихся при частичном выпуске рудной массы из очистного пространства, а также после генерального выпуска. В случае отсутствия истёкшей руды в какой-либо из выпускных выработок при частичном выпуске начало работ по бурению шнуров запрещено до устранения зависания.
Заключение
Данная работа служит презентацией идеи патента [20] и является описанием концепта возможности использования БПЛА в сложных подземных горногехнологических условиях. В результате проведённых исследований были рассмотрены проблемы, возникающие при эксплуатации месторождений полезных ископаемых, разрабатываемых системой с магазинированием руды, а также при эксплуатации выработок выпуска. Повышенная травмоопасность при устранении зависаний, экономический ущерб от неликвидированных зависаний рудной массы и, как следствие, нарушение производственного цикла негативно влияют на эффективность освоения месторождений. Применение высокотехнологичных способов устранения зависаний горных пород и рудной массы является актуальным направлением исследований.
Сноски
1 HTROMC HEBS B-3A Blaster User Manual. Available at: https://device.report/manual/12678220 (accessed: 27.04.2025).
Список литературы
1. Барановский К.В., Смирнов А.А., Рожков А.А., Клюев М.В. Повышение эффективности комбинированной геотехнологии жильных золоторудных месторождений. Известия Тульского государственного университета. Науки о Земле. 2021;(3):117–129.
2. Яковлев В.Л., Корнилков С.В., Соколов И.В. Инновационный базис стратегии комплексного освоения ресурсов минерального сырья. Екатеринбург: УрО РАН; 2018. 360 с.
3. Соболев А.И., Волков Е.С., Петров Е.И., Рафиенко Д.И., Попов Ю.Н., Дубышкин Ю.П. Совершенствование выпуска руды из узкого очистного пространства при разработке жильных месторождений. Горный журнал. 1983;(1):32–24.
4. Гальперин В.Г., Щукин Ю.Г. Опыт ликвидации зависаний руды на рудниках цветной металлургии. М.: ЦНИИцветмет экономики и информ.; 1981. 44 с.
5. Медведев И.Ф., Абрамов А.В., Нефедов А.П. Ликвидация зависаний и вторичное дробление руды. М.: Недра; 1975. 200 с.
6. Мурзин Г.С., Юн Р., Курленя М.В., Апазов Г.Д. Способ ликвидации зависаний в рудоспусках. Патент СССР SU825941A1. Опубл. 30.04.1981
7. Агошков М.И., Борисов С.С., Боярский В.А. Разработка рудных и нерудных месторождений. 3-е изд., перераб. и доп. М.: Недра; 1983. 424 с.
8. Креймер В.И., Мурзин Г.С., Курленя М.В., Апазов Способ ликвидации зависаний сыпучей массы в рудоспусках и устройство для его осуществления. Патент СССР №750073. Опубл. 23.07.1980
9. Hardin P.J., Jensen R.R. Small-scale unmanned aerial vehicles in environmental remote sensing: challenges and opportunities. GIScience & Remote Sensing. 2011;48(1):99–111. https://doi.org/10.2747/1548-1603.48.1.99
10. Yan Z., Yuet L.C., Shuguang Z., Pengpeng W., Guoshao S. Static blasting dangerous rock management method and device based on unmanned aerial vehicle. Patent China CN111483604A. Publication 04.08.2020. (In Chinese).
11. Рыльникова М.В., Струков К.И., Радченко Д.Н., Есина Е.Н. Цифровая трансформация – условие и основа устойчивого развития горнотехнических систем. Горная промышленность. 2021;(3):74–78. https://doi.org/10.30686/1609-9192-2021-3-74-78
12. Каплунов Д.Р., Федотенко В.С. О сути цифровизации горнотехнических систем. Маркшейдерия и недропользование. 2022;(3):3–5.
13. Šoštarić S.B., Vokić E., Bohanek V., Petro L., Pleše P. Innovative Narrow Reef Mining (NRE) technology for ultra-thin subhorizontal ore deposits. Society of Economic Geologists; 2024.
14. Ren H., Zhao Y., Xiao W., Hu Z. A review of UAV monitoring in mining areas: current status and future perspectives. International Journal of Coal Science & Technology. 2019;6(3):320–333. https://doi.org/10.1007/s40789-019-00264-5
15. Конурин А.И., Денисова Е.В., Хмелинин А.П. Основные проблемы и перспективы применения беспилотных летательных аппаратов для обследования выработанного пространства при подземной разработке месторождений. Фундаментальные и прикладные вопросы горных наук. 2016;3(1):93–97.
16. Абрамов А.Ф., Сафронов А.В., Медведев И.Ф. и др. Опыт применения динамореактивных гранатометов для разрушения зависаний крупнокусковой руды в дучках и рудоспусках. Цветная металлургия. 1968;(1):15–18.
17. Довгаль В.А., Османи К.А. Разработка системы расширения дальности полета беспилотного летательного аппарата с помощью технологии беспроводной связи LoRa. Вестник Адыгейского государственного университета. Серия: Естественно-математические и технические науки. 2022;(3):69–76.
18. Кузяков Б.А., Арестов В.В., Малянов Н.А. Эффективные ретрансляторы с квадрокоптерами в атмосферных линиях связи. Фундаментальные проблемы радиоэлектронного приборостроения. 2018;18(4):905–908.
19. Коровецкий Д.А., Матецкий В.Т., Буров Д.В., Букин О.А. Способ разведки ледовой обстановки с использованием телеуправляемых беспилотных летательных аппаратов. Патент РФ RU2631966C1. Опубл. 29.09.2017.
20. Дьячков П.С., Барановский К.В., Рожков А.А. Способ ликвидации зависаний горной массы при подземной разработке месторождений. Патент РФ RU2840939C1. Опубл. 30.05.2025.










