


Разработка принципиальной схемы многопоточного эжектора, оснащенного звеньями переменной длины
 Ю.А. Сазонов, В.В. Воронова, Н.А. Ерёмин, Х.А. Туманян
Ю.А. Сазонов, В.В. Воронова, Н.А. Ерёмин, Х.А. Туманян
Российский государственный университет нефти и газа (НИУ) имени И.М. Губкина, г. Москва, Российская Федерация
Горная Промышленность №5S / 2024 стр.145-150
Резюме: Изучены особенности многопоточного эжектора, оснащенного звеньями переменной длины для управления вектором тяги. Впервые с общих позиций рассмотрены условия, когда угол отклонения вектора тяги может меняться в диапазоне от плюс 180 град до минус 180 град в любом направлении в пределах полной геометрической сферы. В рамках концептуального проектирования с использованием CFD-технологий рассматриваются кинематические схемы со звеньями переменной длины и с гибкими звеньями. Показаны технические возможности для контролируемого распределения энергии по разнонаправленным каналам эжектора при сохранении постоянства давления на входе в сопловой аппарат. Рассмотрены варианты модернизации сопла Лаваля с поворотным диффузором. Результаты исследований патентуются и ориентированы на использование в учебном процессе при подготовке конструкторов с опорой на философию науки и техники и с опорой на методологию Эйлера в рамках работ междисциплинарного характера. Результаты проведенных работ главным образом используются для развития научных исследований и опытно-конструкторских работ при создании энергоэффективных технологий добычи нефти и газа.
Ключевые слова: многопоточный эжектор, вектор тяги, звено переменной длины, CFD-технологии, струйный насос, добыча нефти, добыча газа
Благодарности: Исследование выполнено при финансовой поддержке Министерства образования и науки Российской Федерации в рамках государственного задания в области научной деятельности, тема FSZE-2023-0004.
Для цитирования: Сазонов Ю.А., Воронова В.В., Ерёмин Н.А., Туманян Х.А. Разработка принципиальной схемы многопоточного эжектора, оснащенного звеньями переменной длины. Горная промышленность. 2024;(5S):145–150. https://doi.org/10.30686/1609-9192-2024-5S-145-150
Информация о статье
Поступила в редакцию: 03.09.2024
Поступила после рецензирования: 17.10.2024
Принята к публикации: 18.10.2024
Информация об авторах
Сазонов Юрий Апполоньевич – доктор технических наук, профессор кафедры машин и оборудования нефтяной и газовой промышленности, Российский государственный университет нефти и газа (НИУ) имени И.М. Губкина, г. Москва, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Воронова Виктория Васильевна – кандидат технических наук, доцент кафедры разработки и эксплуатации газовых и газоконденсатных месторождений, Российский государственный университет нефти и газа (НИУ) имени И.М. Губкина, г. Москва, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Еремин Николай Александрович – академик РАЕН, доктор технических наук, Российский государственный университет нефти и газа (НИУ) имени И.М. Губкина, г. Москва, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Туманян Хорен Артурович – младший научный сотрудник Института физики горных пород месторождений, Российский государственный университет нефти и газа (НИУ) имени И.М. Губкина, г. Москва, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Введение
В Эжекторы и струйные насосы из-за их простой конструкции, высокой надежности и экономической эффективности широко применяются во многих отраслях производства, включая энергетические технологии [1–3], область добычи нефти и газа [4; 5]. Развитие мировой энергетики сейчас тесно связано с использованием водорода. Для улучшения водородных технологий активно применяют эжекторы различных типов [6; 7]. Подача рабочей среды в сопло эжектора может осуществляться в импульсном режиме [8]. Электронное управление эжектором может осуществляться при использовании подвижной иглы, размещенной в сопловом аппарате [9].
В двигателях и в энергетических технологиях при использовании высокотемпературных сред применяют кольцевые сопловые эжекторы [10].
Исследуются возможности расширения области применения эжекторов за счет использования криволинейных камер смешения [11]. При разработке эжекторов с криволинейной камерой смешения следует учитывать результаты исследований S-образных каналов [12–14]. Также ставятся вопросы по оптимизации геометрии U-образных каналов [15].
Целью данной статьи является изучение многопоточного эжектора, оснащенного звеньями переменной длины для управления вектором тяги, когда угол отклонения вектора тяги может меняться в диапазоне от плюс 180° до минус 180° в любом направлении в пределах полной геометрической сферы, с перспективой создания интеллектуальных струйных систем управления, отличающихся своим быстродействием, простотой и универсальностью.
Методология
Применяемая методология исследований ориентирована на дальнейшее развитие методологии Эйлера [16–19]. Подготовлена соответствующая блок-схема, показанная на рис. 1.
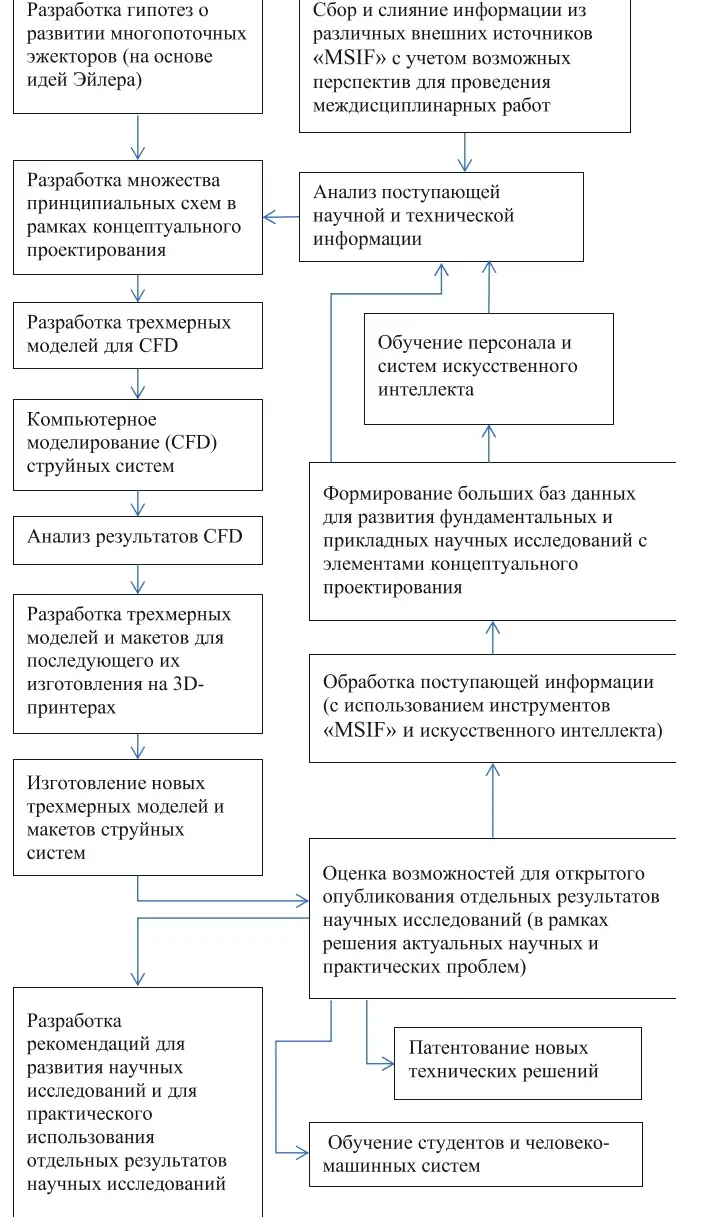 Рис. 1 Блок-схема методологии научных исследований
Рис. 1 Блок-схема методологии научных исследований
Fig. 1 A block diagram of the research methodology
В соответствии с блок-схемой выполняется разработка гипотез о развитии многопоточных эжекторов. Выдвинута гипотеза о возможности создания универсальной и простой системы управления многопоточным эжектором при согласованном распределении энергии в выходных каналах (как при равномерном, так и при неравномерном распределении этой энергии). На данном этапе исследований рассматриваются варианты кинематических схем, содержащих в своем составе звенья переменной длины для управления вектором тяги. В рамках концептуального проектирования ведется разработка множества принципиальных схем в области многопоточных эжекторов.
Результаты проведенных работ используются для развития научных исследований и опытно-конструкторских работ при создании энергоэффективных технологий добычи нефти и газа.
Результаты
При подготовке научного задела [16–19] авторами данной статьи были показаны технические возможности для управления вектором тяги в пределах полной геометрической сферы, когда угол отклонения вектора тяги может меняться в диапазоне от плюс 180° до минус 180° в любом направлении. В качестве рабочей среды (рабочего тела) для изучаемых струйных систем могут выступать газ, жидкость или газожидкостная смесь. Рассмотрим пример деления основного потока Q на четыре части с массовыми расходами (Qa, Qb, Qa2, Qb2 ) при неизменном давлении на входе основного потока:
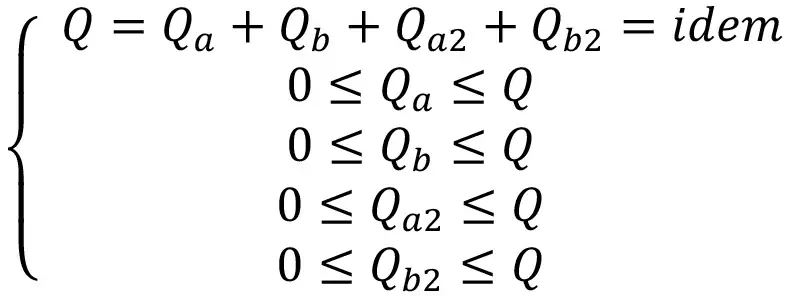 (1)
(1)
Распределение массового расхода по четырем каналам может быть равномерным или неравномерным. Схема подобной струйной системы с четырьмя выходными каналами представлена на рис. 2.
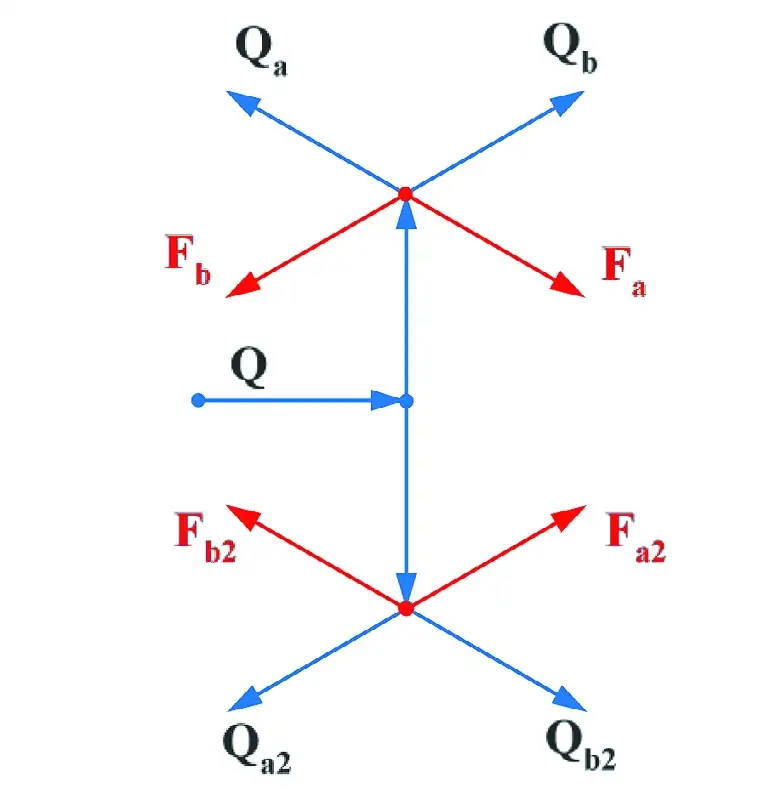 Рис. 2 Схема струйной системы с четырьмя выходными каналами
Рис. 2 Схема струйной системы с четырьмя выходными каналами
Fig. 2. A schematic diagram of the jet system with four outlet channels
Четыре потока с массовыми расходами (Qa, Qb, Qa2, Qb2) провоцируют возникновение четырех реактивных сил соответственно (Fa, Fb, Fa2, Fb2). В представленном примере выделим пару потоков (Qa, Qb), как показано на рис. 3.
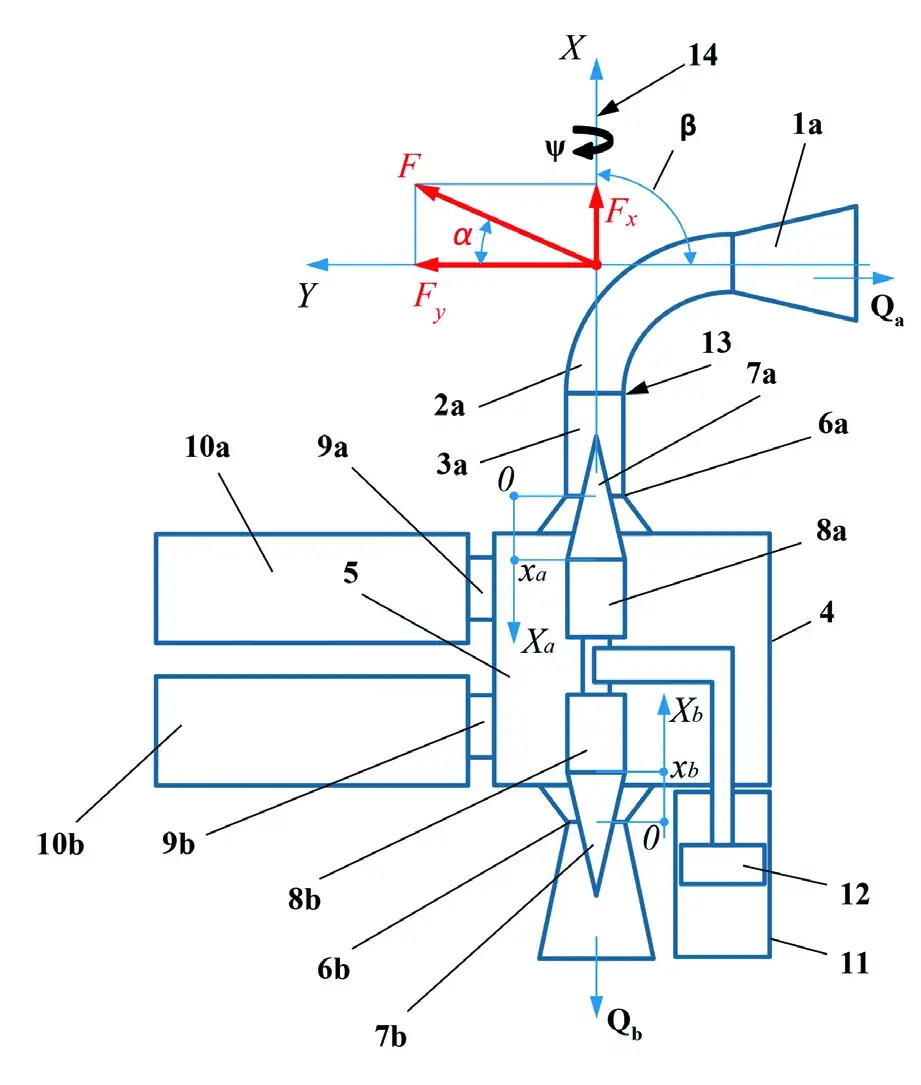
 Рис. 3 Схема соплового аппарата с двумя выходными каналами: 1a – диффузор; 2a – криволинейный патрубок; 3a – переходный патрубок; 4 – корпус; 5 – входной канал; 6a, 6b – критические сечения; 7a, 7b – клинообразные наконечники; 8a, 8b – штоки с квадратными поперечными сечениями; 9a, 9b – запорные устройства; 10a, 10b – источники рабочей среды; 11 – цилиндр гидравлического привода; 12 – поршень гидравлического привода; 13 – плоскость контакта между патрубками; 14 – ось вращения
Рис. 3 Схема соплового аппарата с двумя выходными каналами: 1a – диффузор; 2a – криволинейный патрубок; 3a – переходный патрубок; 4 – корпус; 5 – входной канал; 6a, 6b – критические сечения; 7a, 7b – клинообразные наконечники; 8a, 8b – штоки с квадратными поперечными сечениями; 9a, 9b – запорные устройства; 10a, 10b – источники рабочей среды; 11 – цилиндр гидравлического привода; 12 – поршень гидравлического привода; 13 – плоскость контакта между патрубками; 14 – ось вращения
Fig. 3 A schematic of a nozzle assembly with two outlet channels: 1a – a diffuser; 2a – a curved pipe; 3a – a transition pipe; 4 – housing; 5 – an inlet channel; 6a, 6b – critical sections; 7a, 7b – wedge-shaped tips; 8a, 8b – rods with square cross-sections; 9a, 9b – shut-off devices; 10a, 10b – sources of the working medium; 11 – the hydraulic drive cylinder; 12 – the hydraulic drive piston; 1 4– the contact plane between the nozzles; 14 – the rotation axis
Сопловой аппарат имеет один входной канал 5 и два выходных канала с квадратными критическими сечениями 6a, 6b со стороной квадрата S. Для регулировки площади канала в критическом сечении используются клинообразные наконечники 7a, 7b. При этом сопловой аппарат оснащен штоками 8a, 8b с квадратными поперечными сечениями. В этом случае суммарная площадь канала в критическом сечении f_a:
 (2)
(2)
где xa – смещение (координата) клинообразного наконечника по оси Xa; L – длина клинообразного наконечника. Смещение клинообразного наконечника 7а и 7b может осуществляться с помощью гидропривода (на рисунке схематично показан цилиндр 11 и поршень 12).
Источники рабочей среды могут одновременно подавать рабочую среду во входной канал 5. Возможен и другой режим работы – последовательное во времени подключение источника 10a, а затем источника 10b. С помощью запорных устройств 9a, 9b обеспечивается тот или иной режим работы источников рабочей среды.
В данном примере один из выходных каналов оснащен криволинейным патрубком 2а, который позволяет осуществлять поворот диффузора 1а на угол ψ вокруг оси 14. Кроме того, в этом примере, в частном случае, криволинейный патрубок 2а обеспечивает поворот потока на угол (β = 90°). Но в общем случае можно принять следующее условие: (0 ≤ β ≤ 180°). В ходе численных экспериментов необходимо будет оценить потери тяги экспериментального сопла Лаваля для условия, когда угол (β = 90°). Обычно же на практике используют классическое сопло Лаваля при условии (β = 0°).
 Рис. 4 Схема регулируемого эжектора, оснащенного механическим приводом (Lab = var): 6а, 6b – критическое сечение; 7a, 7b – клинообразные наконечники; 8a, 8b – штоки с квадратными поперечными сечениями; 10a, 10b – источники рабочей среды
Рис. 4 Схема регулируемого эжектора, оснащенного механическим приводом (Lab = var): 6а, 6b – критическое сечение; 7a, 7b – клинообразные наконечники; 8a, 8b – штоки с квадратными поперечными сечениями; 10a, 10b – источники рабочей среды
Fig. 4 A schematic diagram of an adjustable ejector equipped with a mechanical drive (Lab = var): 6а, 6b – the critical crosssection; 7a, 7b – wedge-shaped tips; 8a, 8b – rods with square cross-sections; 10a, 10b – sources of the working medium
На рис. 4 схематично показан вариант соплового аппарата с механическим приводом для управления движением клинообразных наконечников 7a, 7b. В кинематическую схему такого устройства включены звенья переменной длины, когда обеспечивается возможность изменять расстояние между клинообразными наконечниками 7a, 7b, соответственно изменяется и значение линейного параметра Lab. Одно из запатентованных технических решений также представлено в патенте авторов данной статьи (патент РФ на изобретение №2819487), где в кинематической схеме используются звенья переменной длины.
В представленном примере принято условие (γc1 + γc2 = 90°).
Поворот кривошипа радиусом Rc на угол γc1 обеспечивает изменение параметра Lab за счет изменения суммы проекций звена Rc и звена Lc на ось Xa.
 (3)
(3)
где (xc–xd) – сумма проекций звена Rc и звена Lc на ось Xa. Для угла(γc1 = 0) соответственно сумма проекций звена Rc и звена Lc на ось Xa будет наибольшей:
 (4)
(4)
Смещение клинообразных наконечников 7а и 7b может осуществляться с помощью механического привода за счет смещения центра «С» кривошипа радиусом Rc при сохранении (при фиксации) выбранного значения γc1 (при этом будет меняться и координата xc по оси Xa). Расстояние между критическими сечениями 6а, 6b принимается неизменным и равным x(6b).
Для примера по рис. 2 и 3, когда угол (β = 90°), составлены следующие соотношения:
 (5)
(5)
Для варианта, когда (Lab = x(6b)–L), при равенстве соответствующих геометрических размеров деталей (7а, 7b) будут верны следующие соотношения:
 (6)
(6)
Для совместной работы могут быть использованы два сопловых аппарата, каждый из которых выполнен по схеме из рис. 4. На рис. 5 показан такой пример соплового аппарата с четырьмя выходными каналами. В такой системе формируются уже четыре потока с массовыми расходами (Qa, Qb, Qa2, Qb2), провоцируют возникновение четырех реактивных сил соответственно (Fa, Fb, Fa2, Fb2), как это было показано на рис. 2.
 Рис. 5 Схема соплового аппарата с четырьмя выходными каналами: 6a, 6b – основные выходные каналы; 6a2, 6b2 – дополнительные выходные каналы
Рис. 5 Схема соплового аппарата с четырьмя выходными каналами: 6a, 6b – основные выходные каналы; 6a2, 6b2 – дополнительные выходные каналы
Fig. 5 A schematic of a nozzle assembly with four outlet channels: 6a, 6b – the main outlet channels; 6a2, 6b2 – additional outlet channels
Управление дополнительными выходными каналами (6a2, 6b2) может быть связано с движением общего центра «С», как показано на рис. 5. Но не исключаются варианты, когда потоки в основных каналах (6a, 6b) и потоки в дополнительных каналах (6a2, 6b2) будут контролироваться с помощью двух раздельных систем управления.
Различные варианты сопловых аппаратов и многопоточных эжекторов с использованием схем на рис. 3–5 могут быть использованы при разработке летательных аппаратов с вертикальным взлетом и посадкой. Использование звеньев переменной длины обеспечивает возможности для быстрого и полного перекрытия определенной группы каналов и для выполнения уникальных и сложных маневров, которые в перспективе уже не будут доступны отдельному человеку (в силу его ограниченных физиологических способностей), но которые будут доступны только искусственному интеллекту.
При использовании звеньев переменной длины подобные струйные системы позволяют распределять энергию рабочей среды по сети разнонаправленных выходных каналов соплового аппарата, расширяя технические возможности для управления вектором тяги в пределах полной геометрической сферы в дополнение к описанным ранее технологиям [16–19].
Если рассматривать область энергетики, к примеру, добычу нефти и газа, то в качестве источников рабочей среды (10a, 10b – см. рис. 3 и 4) могут выступать добывающие скважины с высоким пластовым давлением. Многопоточный эжектор в этом случае позволит рационально использовать природную пластовую энергию для поддержания уровня добычи нефти и газа из скважин с пониженным пластовым давлением. Рассматриваются и варианты использования пластовой энергии для генерации электроэнергии на морских нефтяных и газовых месторождениях.
Заключение
Исследованы особенности рабочего процесса многопоточного эжектора, оснащенного регулируемым многопоточным сопловым аппаратом, с использованием звеньев переменной длины. Разработаны новые научные принципы для проектирования многопоточного эжектора при контролируемом распределении энергии по каналам эжектора. Новые технические решения запатентованы.
Разработаны базовые математические модели для проектирования многопоточных эжекторов, позволяющих управлять вектором тяги для условий, когда угол отклонения вектора тяги может меняться в диапазоне от плюс 180 град до минус 180 град в любом направлении в пределах полной геометрической сферы.
Предложены практические рекомендации и новые технические возможности для экстремального управления вектором тяги в пределах полной геометрической сферы при контролируемом распределении энергии по каналам многопоточного эжектора. Результаты выполненных научных исследований могут быть использованы в энергетике, в том числе при добыче нефти и газа.
Список литературы
1. Gruber S., Rola K., Urbancl D., Goričanec D. Recent Advances in Ejector-Enhanced Vapor Compression Heat Pump and Refrigeration Systems – A Review. Energies. 2024;17(16):4043. https://doi.org/10.3390/en17164043
2. Jin M., Zhang X., Zhou J., Zhang L. Performance Analysis of an Ejector-Enhanced Heat Pump System for Low-Temperature Waste Heat Recovery Using UHVDC Converter Valves. Energies. 2024;17(14):3589. https://doi.org/10.3390/en17143589
3. Xu D., Gu Y., Li W., Chen J. Experimental Investigation of the Performance of a Novel Ejector–Diffuser System with Different Supersonic Nozzle Arrays. Fluids. 2024;9(7):155. https://doi.org/10.3390/fluids9070155
4. Aboozar H., Pejman K., Jose A.V., Daniel V.D.J. Systems and methods for gas pulse jet pump. United States Patent 10837463. Publication Date: 11/17/2020. Available at: https://www.freepatentsonline.com/10837463.pdf (accessed: 28.09.2024).
5. Knoeller M.C., Robison C.E., Agarwal M., Paulet B.A. Jet pump controller with downhole prediction. United States Patent 11078766. Publication Date: 08/03/2021. Available at: https://www.freepatentsonline.com/11078766.pdf (accessed: 28.09.2024).
6. Xu Z., Liu B., Tong Y., Dong Z., Feng Y. Modeling and Control of Ejector-Based Hydrogen Circulation System for Proton Exchange Membrane Fuel Cell Systems. Energies. 2024;17(11):2460. https://doi.org/10.3390/en17112460
7. Li J., Wu T., Cheng C., Li J., Zhou K. A Review of the Research Progress and Application of Key Components in the Hydrogen Fuel Cell System. Processes. 2024;12(2):249. https://doi.org/10.3390/pr12020249
8. Li C., Sun B., Bao L. Coupling Global Parameters and Local Flow Optimization of a Pulsed Ejector for Proton Exchange Membrane Fuel Cells. Sustainability. 2024;16(1):4170. https://doi.org/10.3390/su16104170
9. Brunner D.A., Marcks S., Bajpai M., Prasad A.K., Advani S.G. Design and characterization of an electronically controlled variable flow rate ejector for fuel cell applications. International Journal of Hydrogen Energy. 2012;37(5):4457–4466. https://doi.org/10.1016/j.ijhydene.2011.11.116
10. Lysak I.A., Lysak G.V., Konyukhov V.Yu., Stupina A.A., Gozbenko V.E., Yamshchikov A.S. Efficiency Optimization of an AnnularNozzle Air Ejector under the Influence of Structural and Operating Parameters. Mathematics. 2023;11(14):3039. https://doi.org/10.3390/math11143039
11. Völker M., Sausner A. Suction jet pump. United States Patent 10072674. Available at: https://www.freepatentsonline.com/10072674.pdf (accessed: 28.09.2024).
12. Wang C., Lu H., Kong X., Wang S., Ren D., Huang T. Effects of Pulsed Jet Intensities on the Performance of the S-Duct. Aerospace. 2023;10(2):184. https://doi.org/10.3390/aerospace10020184
13. Ahmed F., Eames I., Moeendarbary E., Azarbadegan A. High-Strouhal-number pulsatile flow in a curved pipe. Journal of Fluid Mechanics. 2021;923:A15. https://doi.org/10.1017/jfm.2021.553
14. Brethouwer G. Turbulent flow in curved channels. Journal of Fluid Mechanics. 2022;931:A21. https://doi.org/10.1017/jfm.2021.953
15. Jesudasan R., Müeller J.-D. High-Resolution CAD-Based Shape Parametrisation of a U-Bend Channel. Aerospace. 2024;11(8):663. https://doi.org/10.3390/aerospace11080663
16. Sazonov Yu.A., Mokhov M.A., Gryaznova I.V., Voronova V.V., Tumanyan K.A., Konyushkov E.I. Thrust Vector Control within a Geometric Sphere, and the Use of Euler's Tips to Create Jet Technology. Civil Engineering Journal. 2023;9(10):2516–2534. https://doi.org/10.28991/CEJ-2023-09-10-011
17. Sazonov Yu.A., Mokhov M.A., Gryaznova I.V., Voronova V.V., Tumanyan K.A., Konyushkov E.I. Solving Innovative Problems of Thrust Vector Control Based on Euler's Scientific Legacy. Civil Engineering Journal. 2023;9(11):2868-2895. https://doi.org/10.28991/CEJ-2023-09-11-017
18. Sazonov Yu.A., Mokhov M.A., Gryaznova I.V., Voronova V.V., Tumanyan K.A., Konyushkov E.I. Methods for regulating ejector systems within interdisciplinary research using computer modeling. International Journal on Technical and Physical Problems of Engineering. 2023;15(4):306–320. Available at: https://www.iotpe.com/IJTPE/IJTPE-2023/IJTPE-Issue57-Vol15-No4-Dec2023/39-IJTPE-Issue57-Vol15-No4-Dec2023-pp306-320.pdf (accessed: 28.09.2024).
19. Sazonov Yu.A., Mokhov M.A., Bondarenko A.V., Voronova V.V., Tumanyan K.A., Konyushkov E.I. Interdisciplinary Studies of Jet Systems using Euler Methodology and Computational Fluid Dynamics Technologies. HighTech and Innovation Journal. 2023;4(4):703–719. https://doi.org/10.28991/HIJ-2023-04-04-01










