


Сканирующая тахеометрия в решении маркшейдерских задач при подземной отработке месторождения «Перевальное»
 В.В. Арно1 , Е.П. Колесниченко2, И.Ю Гарифулина1, Е.А. Миккельсен1
В.В. Арно1 , Е.П. Колесниченко2, И.Ю Гарифулина1, Е.А. Миккельсен1
1 Северо-Восточный государственный университет, г. Магадан, Российская Федерация
2 Московский государственный университет им. М.В. Ломоносова, г. Москва, Российская Федерация
Горная Промышленность №3 / 2025 стр. 40-44
Резюме: В статье проведено сравнительное исследование двух лазерных сканеров – GO SLAM и Void Scanner VS+ – для решения маркшейдерских задач на месторождении «Перевальное» при подземной отработке. Основное внимание уделено анализу работы устройств в сложных условиях подземной среды, таких как запыленность, загазованность и высокая влажность, в процессе выполнения закладочных работ бутобетоном. Целью исследования было провести сравнительный анализ технических характеристик и эффективности работы сканеров на практике. Методы исследования включали анализ геологического строения участка, выбор очистной камеры для проведения экспериментов, изучение технических характеристик сканеров, методику проведения сравнительных измерений в условиях запыленности и отсутствия пыли, анализ влияния внешних факторов подземной среды и оценку стоимости и доступности оборудования. Результаты исследования указывают на преимущества и ограничения каждого сканера в различных условиях. GO SLAM показал высокую устойчивость к неблагоприятным условиям и эффективность в оперативном сканировании, в то время как Void Scanner VS+ обеспечивал высокую точность измерений при благоприятных условиях, но имел ограничения при загрязненной среде.
Ключевые слова: сканирующая тахеометрия, маркшейдерия, GO SLAM, Void Scanner VS+, бутобетонная закладка, запыленность
Для цитирования: Арно В.В., Колесниченко Е.П., Гарифулина И.Ю, Миккельсен Е.А. Сканирующая тахеометрия в решении маркшейдерских задач при подземной отработке месторождения «Перевальное». Горная промышленность. 2025;(3):40–44. https://doi.org/10.30686/1609-9192-2025-3-40-44
Информация о статье
Поступила в редакцию: 02.03.2025
Поступила после рецензирования: 10.04.2025
Принята к публикации: 10.04.2025
Информация об авторах
Арно Вероника Владимировна – кандидат технических наук, доцент Политехнического института, Северо-Восточный государственный университет, г. Магадан, Российская Федерация; е-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Колесниченко Ева Павловна – студент направления подготовки «Государственный и муниципальный аудит» Высшей школы государственного аудита, Московский государственный университет им. М.В. Ломоносова, Москва, Российская Федерация; е-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Гарифулина Ирина Юрьевна – старший преподаватель кафедры геологии и горного дела Политехнического института, Северо-Восточный государственный университет, г. Магадан, Российская Федерация; е-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Миккельсен Екатерина Александровна – студент направления подготовки «Горное дело», специализация «Подземная разработка рудных месторождений» Политехнического института, Северо-Восточный государственный университет, г. Магадан, Российская Федерация; е-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Введение
Маркшейдерское обеспечение подземных горных работ требует применения современных технологий, обеспечивающих высокую точность измерений и оперативность обработки данных. Одним из таких инструментов является сканирующая таксометрия, позволяющая эффективно решать задачи контроля геометрии горных выработок, мониторинга закладочных работ и моделирования поверхностей [1; 2].
В статье рассматривается применение двух лазерных сканеров – GO SLAM и Void Scanner VS+ – для выполнения маркшейдерских задач на месторождении «Перевальное». Основное внимание уделено анализу их работы в сложных условиях подземной среды (запыленность, загазованность, высокая влажность) при выполнении закладочных работ бутобетоном.
Цель исследования – провести сравнительный анализ технических характеристик и эффективности работы двух сканеров в реальных условиях эксплуатации на месторождении «Перевальное» [3–5].
Методы. Объект исследования
Методы исследования включали анализ геологического строения участка, выбор очистной камеры для проведения экспериментов, изучение технических характеристик сканеров, методику проведения сравнительных измерений в условиях запыленности и отсутствия пыли, анализ влияния внешних факторов подземной среды и оценку стоимости и доступности оборудования [6–8].
Исследования проводились на участке ВЕ-3 р.т. 4.2 горизонта 780 месторождения «Перевальное», расположенного в Омсукчанском городском округе Магаданской области РФ. Геологическое строение участка представлено терригенными и вулканогенными породами мелового возраста с интуитивными телами кислого состава
. Для проведения эксперимента была выбрана очистная камера 930-1-34 горизонта 925, где выполнялись закладочные работы с использованием бутобетона. Анализ технических характеристик сканеров GO SLAM и Void Scanner VS+ приведён в табл. 1.
Таблица 1 Технические характеристики сканеров GO SLAM и Void Scanner VS+
Table 1 Specifications of the GO SLAM and Void Scanner VS+ scanners
| Параметры | GO SLAM | Void Scanner VS+ |
|---|---|---|
| Разрешение, мм | До 1 | До 2 |
| Дальность измерений, м | До 100 | До 150 |
| Скорость сканирования, тыс. точек/с | До 300 | До 200 |
| Точность позиционирования, мм | ±5 | ±10 |
| Особенности | Мобильный портативный прибор с функцией построения облаков точек в реальном времени | Стационарный прибор для работы в ограниченных пространствах |
Методика проведения сравнительных измерений
Лазерное сканирование очистной камеры во время закладочных работ бутобетоном было проведено в условиях высокой запыленности после бурения (СБУ) и при отсутствии пыли (чистая камера).
Сравнение результатов выполнено по следующим параметрам:
– точность позиционирования границ бутобетонной закладки;
– полнота облаков точек (плотность данных);
– скорость выполнения сканирования и обработки данных;
– анализ влияния внешних факторов подземной среды (температура, влажность, запыленность) на работу каждого устройства [9; 10];
– оценка стоимости оборудования и доступности для применения на объектах подземной разработки.
Результаты и их обсуждение
Сравнение результатов работы сканеров
При выполнении сканирования после бурения в условиях запыленности наблюдались значительные различия между устройствами:
1. Void Scanner VS+:
– облако точек оказалось разреженным из-за рассеивания лазера на частицах пыли;
– точность позиционирования снизилась до ±20 мм из-за недостаточной плотности данных, при этом моделирование поверхности потребовало значительной ручной корректировки из-за «разлета» точек.
2. GO SLAM:
– плотное облако точек с минимальными шумами благодаря встроенным алгоритмам фильтрации данных;
– точность позиционирования составила ±5 мм даже при высокой запыленности камеры.
В условиях отсутствия пыли (в чистой камере) оба устройства показали сопоставимые результаты (рис. 1): точность определения границ бутобетонной закладки составила ±5 мм у обоих устройств. Однако скорость выполнения измерений у GO SLAM оказалась выше за счет мобильности прибора.
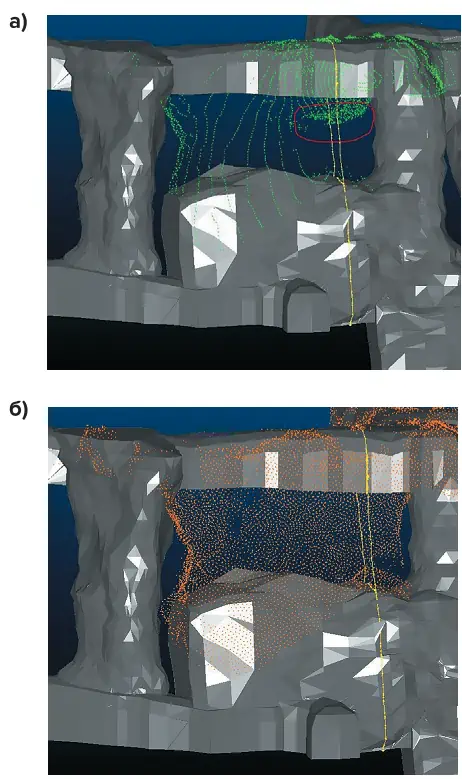
Рис. 1 Визуальный результат работы лазерных сканеров Void Scanner VS+ (a) и GO SLAM (б)
Fig. 1 Visualized results of the Void Scanner VS+ (a) and GO SLAM (б) laser scanners operation
Сравнение результатов исследования работы лазерных сканеров Void Scanner VS+ и GO SLAM по точности позиционирования и моделирования поверхностей представлено в табл. 2.
Таблица 2 Основные параметры работы сканеров GO SLAM и Void Scanner VS+
Table 2 Basic operation parameters of the GO SLAM and Void Scanner VS+ scanners
| Параметры | GO SLAM | Void Scanner VS+ | |
|---|---|---|---|
| Оценка времени, затраченного на сканирование и обработку данных | Среднее время выполнения одного цикла сканирования | Около 15 мин (включая перемещение оператора) | Около 30 мин (включая настройку стационарного прибора) |
| Время на обработку данных | ≈30 мин (минимальная ручная корректировка благодаря высокой плотности облаков точек) | ≈60 мин (для устранения ошибок разреженных участков) | |
| Анализ влияния различных условий подземной среды | Температура | 10 °C…+40 °C (устойчивы к температурным колебаниям, характерным для подземных выработок месторождения «Перевальное») | |
| Влажность | Высокая влажность не оказала значительного влияния на качество данных обоих устройств, однако GO SLAM показал большую устойчивость к конденсации влаги на оптических элементах благодаря встроенной системе защиты | ||
| Запыленность | Хорошее качество данных в условиях высокой запыленности (благодаря встроенным алгоритмам фильтрации шумов, что позволяет получить плотное облако точек даже в сложных условиях) | Значительное снижение качества данных в условиях высокой запыленности (лазерный луч рассеивается на частицах пыли, что приводит к разреженности облаков точек и снижению точности позиционирования) | |
| Оценка стоимости и доступности оборудования | Стоимость | Около 2 млн руб. | Около 3 млн руб. |
| Ценовой сегмент / Доступность | Средний / Широко представлен на рынке, подходит для мобильного использования | Выше среднего / Специализированное оборудование, требующее стационарной установки и более сложной настройки | |
Сценарии применения
В ходе испытаний для каждого исследуемого лазерного сканера были выявлены оптимальные сценарии применения:
1. GO SLAM:
– рекомендуется для использования в условиях высокой запыленности, загазованности и влажности;
– оптимален для оперативного сканирования больших объемов выработок благодаря мобильности и высокой скорости работы;
– подходит для задач контроля закладочных работ и мониторинга состояния горных выработок в реальном времени.
2. Void Scanner VS+:
– рекомендуется для использования в чистых камерах или при необходимости выполнения высокоточных измерений на больших расстояниях (до 150 м);
– подходит для задач детального моделирования поверхностей при отсутствии внешних факторов, влияющих на качество данных.
Заключение
Сравнительный анализ двух лазерных сканеров – GO SLAM и Void Scanner VS+ – показал их преимущества и ограничения при решении маркшейдерских задач на месторождении «Перевальное»:
1. GO SLAM продемонстрировал высокую устойчивость к неблагоприятным условиям подземной среды (запыленность, влажность) и оказался более эффективным инструментом для оперативного сканирования.
2. Void Scanner VS+ обеспечивает высокую точность измерений при благоприятных условиях, но его использование ограничено низкой устойчивостью к загрязнению среды.
3. Время выполнения работ с использованием GO SLAM оказалось почти в два раза меньше по сравнению с Void Scanner VS+, что делает его предпочтительным выбором для динамичных производственных процессов.
Выбор оборудования должен основываться на специфике условий эксплуатации и поставленных задачах [10–12]. В дальнейшем планируется расширить область исследований путем тестирования других моделей лазерных сканеров для решения аналогичных задач на различных объектах подземной разработки.
Вклад авторов
В.В. Арно – идея исследований, формулировка конфликта текущей парадигмы и новых фактов, написание научной работы.
Е.П. Колесниченко, Е.А. Миккельсен – оценка результатов и коррекция написанной работы.
И.Ю. Гарифулина – оценка результатов исследования, выборка и сбор материала для исследований.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Список литературы
1. Кузьмин Т.В., Васильев М.Д., Голубко Б.П. Наземное и мобильное лазерное сканирование в маркшейдерской съёмке при разработке месторождений открытым способом. В кн.: Уральская горная школа-регионам: материалы междунар. науч.-практ. конф., г. Екатеринбург, 6–7 апреля 2020 г. Екатеринбург: Уральский государственный горный университет; 2020. С. 241–242.
2. Алтынцев М.А. Применение технологии наземного лазерного сканирования для создания обмерных чертежей фасадов зданий. Вестник СГУГиТ (Сибирского государственного университета геосистем и технологий). 2022;27(3):5–18. https://doi.org/10.33764/2411-1759-2022-27-3-5-18 Altyntsev M.A. Application of terrestrial laser scanning technology for creating record drawings of building facades. Vestnik of the Siberian State University of Geosystems and Technologies (SSUGT). 2022;27(3):5–18. (In Russ.) https://doi.org/10.33764/2411-1759-2022-27-3-5-18
3. Бесимбаева О.Г., Хмырова Е.Н., Олейникова Е.А. Маркшейдерское обеспечение проведения горных работ с применением инновационных технологий. Восточно-европейский научный журнал. 2016;14(3):60–65. Besimbaeva O.G., Khmyrova E.N., Oleynikova E.A. Surveying the provision of mining with the use of innovative technologies. East European Scientific Journal. 2016;14(3):60–65. (In Russ.)
4. Алтынцев М.А., Карпик П.А. Методика создания цифровых трехмерных моделей объектов инфраструктуры нефтегазодобывающих комплексов с применением наземного лазерного сканирования. Вестник СГУГиТ (Сибирского государственного университета геосистем и технологий). 2020;25(2):121–139. https://doi.org/10.33764/2411-1759-2020-25-2-121-139 Altyntsev M.A., Karpik P.A. The technique for creating digital three-dimensional models of oil and gas manufacturing facility object infrastructure using terrestrial laser scanning. Vestnik of the Siberian State University of Geosystems and Technologies (SSUGT). 2020;25(2):121–139. (In Russ.) https://doi.org/10.33764/2411-1759-2020-25-2-121-139
5. Грищенкова Е.Н., Мустафин М.Г. Пространственная визуализация процесса сдвижения с помощью инструментальных средств 3DS MAX. Горный информационно-аналитический бюллетень. 2017;(9):36–41. Режим доступа: https://giab-online.ru/files/Data/2017/9/36_41_9_2017.pdf (дата обращения: 27.02.2025). Grishchenkova E.N., Mustafin M.G. Spatial visualization of displacement using 3DSMAX apparatus. Mining Informational and Analytical Bulletin. 2017;(9):36–41. (In Russ.) Available at: https://giab-online.ru/files/Data/2017/9/36_41_9_2017.pdf (accessed: 27.02.2025).
6. Курбатова В.В. Аппроксимация методики наземной лазерно-сканирующей тахеометрии к съемке подземных выработок. Вектор ГеоНаук. 2018;1(3):40–52. Kurbatova V.V. Approximation methods terrestrial laser scanning of tacheometry the survey of underground workings. Vector of Geosciences. 2018;1(3):40–52. (In Russ.)
7. Курбатова В.В. Валидность сканирующей тахеометрии в решении комплекса маркшейдерских задач. Вектор ГеоНаук. 2018;1(1):8–23. Kurbatova V.V. The validity of the scan tacheometry in the solution of complex surveying tasks. Vector of Geosciences. 2018;1(1):8–23. (In Russ.)
8. Brown A., Williams C. Advances in scanner technology for geological surveys in mining operations. Journal of Geospatial Engineering. 2020;15(1):32–45.
9. Овчаренко А.В., Удоратин В.В. Оперативное изучение подземных пустот с помощью лазерного 3D-сканирования. Вестник института геологии Коми научного центра Уральского отделения РАН. 2015;(4):20–25. Ovcharenko A.V., Udoratin V.V. The operative study of underground cavities by 3D-scanning. Vestnik of Institute of Geology of Komi Science Center of Ural branch RAS. 2015;(4):20–25. (In Russ.)
10. Палатурян Р.А. Преимущества сканирующего тахеометра на практике. Наука. Техника. Технологии (политехнический вестник). 2017;(2):230–233. Palaturyan R.A. Advantages of the scanning total station in practice. Science. Engineering. Technology (polytechnical bulletin). 2017;(2):230–233. (In Russ.)
11. Oludare I.M., Pradhan B. A decade of modern cave surveying with terrestrial laser scanning: A review of sensors, method and application development. International Journal of Speleology. 2016;45(1):71–88. https://doi.org/10.5038/1827-806X.45.1.1923
12. Wagner A. A new approach for geo-monitoring using modern total stations and RGB + D images. Measurement. 2016;82:64– 74. https://doi.org/10.1016/j.measurement.2015.12.025










