


Современные системы предотвращения столкновений горной техники и наездов на персонал при ведении открытых горных работ

А.Ф. Клебанов, канд. техн. наук, директор по науке ГК «Цифра»
М.В. Кадочников, канд. техн. наук, руководитель проекта АО «ВИСТ Групп»
В.В. Улитин, менеджер по продуктам АО «ВИСТ Групп»
Д.Н. Сиземов, канд. техн. наук, заместитель директора по информационным технологиям АО «СУЭК»
Развитие законодательной базы и появление новых требований к обеспечению безопасности на промышленных объектах, обуславливает необходимость внедрения новых информационных технологий, способных минимизировать число опасных факторов и аварийных ситуаций. Анализ статистики несчастных случаев на открытых горных работах показывает, что инциденты, связанные со столкновениями крупногабаритной техники, наездами на легкий автотранспорт и персонал, являются наиболее распространенным видом аварий, представляющих серьезную опасность для жизни и здоровья людей. Подобные аварии в первую очередь вызваны плохим обзором оператора. В таблице представлены наиболее распространенные сценарии возникновения инцидентов:
Низкая скорость движения крупногабаритной горной техники во время выполнения маневров создает иллюзию безопасности, в то время как конструктивные особенности этой техники обусловливают наличие слепых зон, в которых оператор не имеет возможности для визуального контроля за находящимися поблизости объектами.
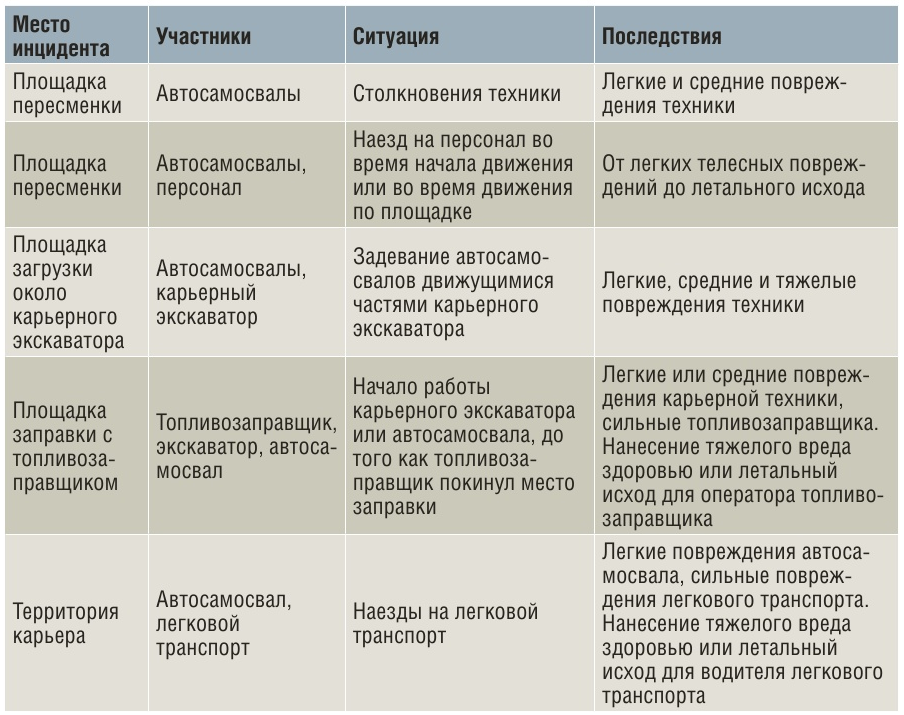
Столкновение карьерной техники с легким транспортным средством вызывает катастрофические последствия не только для жизни и здоровья людей, но и для работоспособности горного оборудования. Единственная авария, даже если она обходится без травм, может приостановить добычу полезных ископаемых на несколько дней. Затраты на ремонт, простой техники, административные взыскания и потеря производительности – все это оказывает значительное негативное влияние на эффективность горного производства. Рассмотрим примеры реальных случаев возникновения вышеописанных инцидентов:
1) Водитель карьерного автосамосвала, двигаясь по технологической дороге, вовремя не увидел находившийся на ней автомобиль одного из сотрудников предприятия и проехал по его правой стороне, практически полностью расплющив (рис. 1). Сотрудник, находящийся в машине, успел пригнуться к пассажирскому сидению, что позволило ему выжить.
- Рис. 1 Инцидент с наездом автосамосвала на легковой автомобиль
2) Примерно через час после начала смены приехал топливозаправщик «КамАЗ 43118», водитель которого начал заправлять топливом экскаватор Komatsu PS 2000-8. Машинист экскаватора не убедился в том, что в опасной зоне работающего экскаватора нет людей, и подумал, что находящийся рядом грузовой автомобиль окончил заправку топливом и уехал. Мужчина стал поворачивать стрелу спецтехники в сторону забоя, кузовом экскаватора зацепил грузовик и опрокинул его (рис. 2). Водитель КамАЗа оказался придавлен кабиной к земле.

- Рис. 2 Инцидент с опрокидыванием топливозаправщика
Статистика по крупнейшим отечественным предприятиям ОГР за 2003– 2018 гг. показывает, что 24% несчастных случаев с участием карьерной техники связаны с движением/работой техники при нахождении людей в непосредственной близости. В том числе 14% характеризуются пребыванием людей в «слепой зоне» обзора машиниста (водителя), 12% – относятся к движению задним ходом или рабочим движениям кормовой части машин. 1/5 всех указанных несчастных случаев, по результатам расследования, могла быть предотвращена с помощью наблюдателя, владеющего картиной происходящего извне.
На сегодняшний день практически единственным способом защиты от возникновения наездов являются административные барьеры, такие как запретные зоны для нахождения людей и легкой техники, жестко прописанные регламенты выполнения маневров, звуковая сигнализация при движении задним ходом. Однако, как показывает статистика, данные меры являются недостаточными и не способны обеспечить должную безопасность.
Решением задачи минимизации описанных инцидентов является применение специализированных аппаратно-программных комплексов, способных расширить поле зрения оператора, при этом не отвлекая его от выполнения производственных задач и не перегружая избыточной визуальной информацией. Таким образом, система предупреждения столкновений и наездов на персонал карьерной техникой должна взять на себя большую часть информационной нагрузки, предоставляя оператору минимальный набор данных о количестве, типе, расположении и степени опасности статических и движущихся объектов, расположенных в рабочей зоне самосвала или экскаватора. Система должна обеспечивать ранжирование как степени опасности текущей ситуации, оперируя данными о расстоянии до объектов, так и интенсивности оповещения оператора о возможном столкновении при помощи аудиовизуальной сигнализации, минимизируя ложные срабатывания.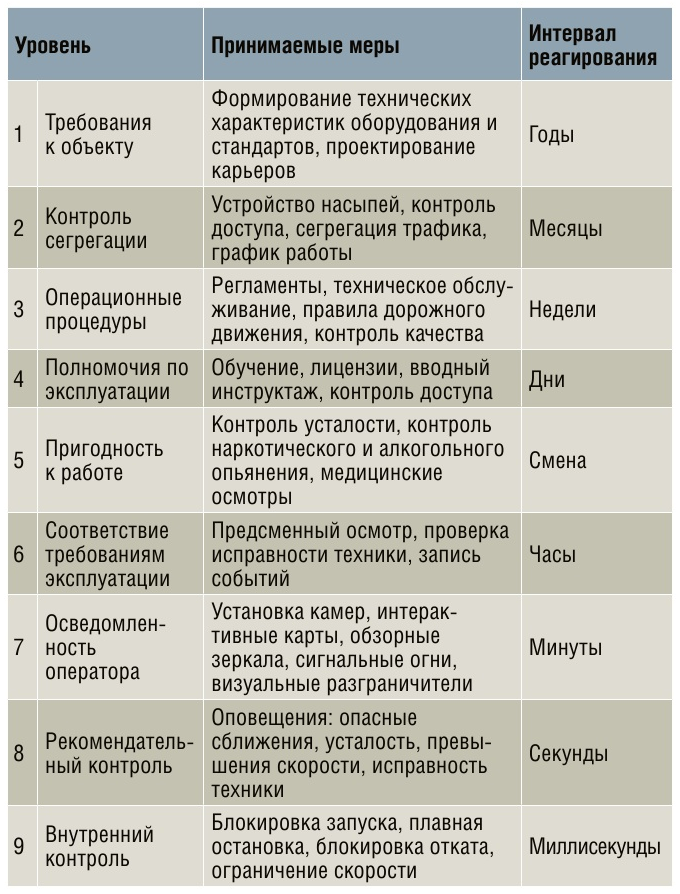
В настоящее время на зарубежных горнодобывающих предприятиях принимаются меры превентивного контроля инцидентов, которые можно разделить на следующие уровни (согласно EMESRT – The Earth Moving Equipment Safety Round Table):
Системы предупреждения о столкновениях (Collision Warning System) относятся к 8-му уровню (рекомендательный контроль) превентивного контроля инцидентов и являются первым уровнем реализации более общего класса систем предотвращения столкновений (Collision Avoidance System – CAS), которые помимо функций оповещения обеспечивают возможность экстренной остановки автотранспортного средства с целью предотвращения аварии (9-й уровень превентивного контроля инцидентов). Поскольку возможность экстренной остановки требует вмешательства в конструктив или управляющие информационные каналы автотранспортного средства с целью оказания воздействий на исполнительные механизмы, разработка таких систем требует непосредственного участия заводов-изготовителей карьерной техники.
Необходимо отметить, что законодательство РФ в части подземных горных работ уже несколько лет предъявляет требования по оборудованию горнодобывающей техники системами предупреждения столкновений. Приказ Ростехнадзора №599 от 11.12.2013 гласит: Транспортные машины, эксплуатируемые на шахтах по добыче полезных ископаемых, должны быть оборудованы системами предотвращения столкновений. Система предотвращения столкновений должна обеспечивать своевременное оповещение машиниста о наличии людей и транспортных средств в радиусе траектории движения машины. Для открытых горных работ на сегодняшний день законом не регламентируется необходимость оснащения техники системами предотвращения столкновений, однако имеющиеся тенденции по усилению промышленной безопасности свидетельствуют о том, что такие требования могут появиться в ближайшие несколько лет. В профессиональной среде уже ведется обсуждение мер по обеспечению системами предупреждения столкновений карьерной техники при разработке месторождений открытым способом.
Рассмотрим технологии, которые применяются в настоящее время для реализации систем предупреждения столкновений. Различают два основных сценария работы системы предотвращения столкновений: Транспорт – Транспорт (Т-Т) и Транспорт – Человек (Т-Ч).
В зависимости от сценария, а также условий эксплуатации применяется несколько технологий построения систем предупреждения столкновений, которые используют в своем составе такое оборудование, как лидары, радары, видеокамеры или радиосвязь. Предлагаемые на рынке системы обладают различной стоимостью, дальностью работы и условиями эксплуатации. К основным технологиям, используемым для построения систем предупреждения столкновений, относятся:
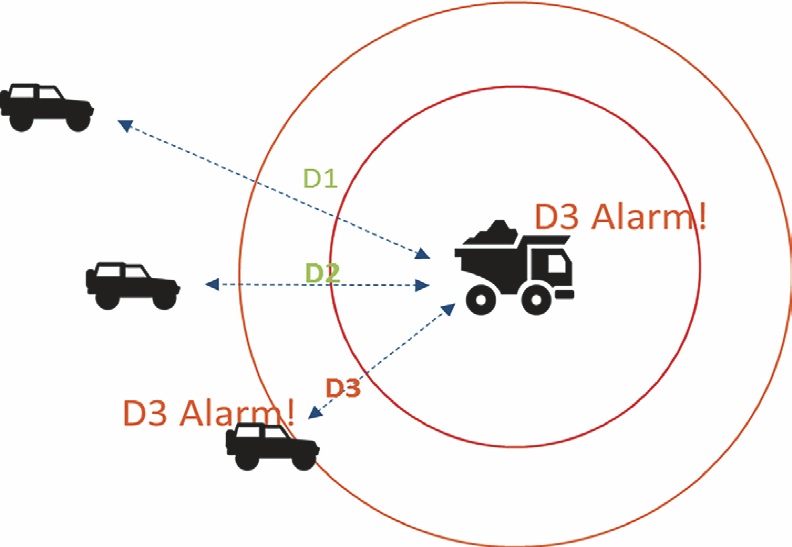
GNSS (Global Navigation Satellite System) – системы спутниковой навигации, представляющие собой более точный аналог GPS. Высокая точность достигается с помощью наземной станции (координаты которой постоянны и не изменяются), которая служит для корректировки погрешности измерения GPS-трекеров на транспорте или носимых тэгов у персонала. Может использоваться в двух сценариях (Транспорт – Транспорт, Транспорт – Человек), предназначена только для открытой добычи.
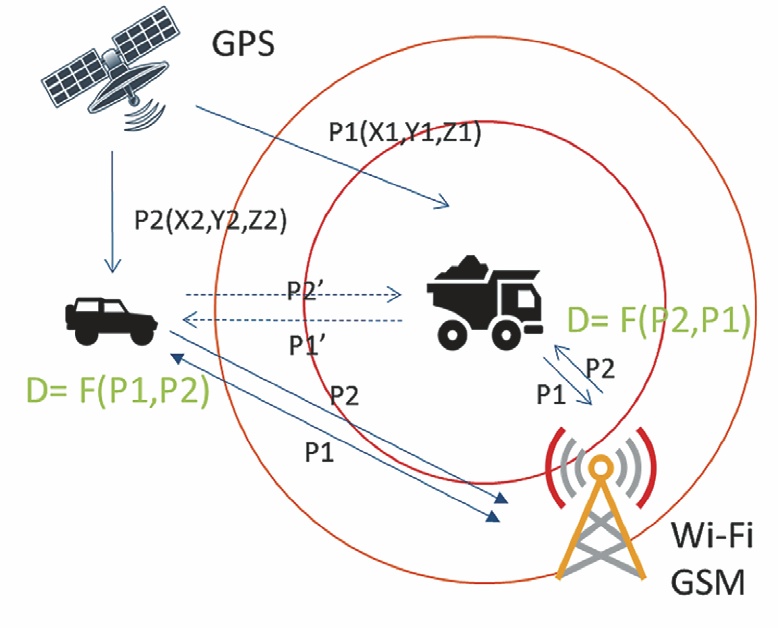
- Рис. 3 Принцип работы системы предупреждения столкновений на базе GPS
Преимущества:
– легко внедряется как расширение возможностей системы диспетчеризации открытых горных работ;
– позволяет организовать дополнительный функционал, такой как позиционирование объектов на карте, контроль приближения к опасным зонам и др.
Недостатки:
– неприменимо для подземных горных работ и закрытых помещений;
– требует стабильного сигнала GPS;
– зависит от системы передачи данных между техникой и/ или сервером, требует 100%-ного покрытия.
Системы радарного сканирования окружения.
В данных системах используются радары и лидары. Система предназначена для работы в зоне прямой видимости и используется в сценарии Транспорт – Транспорт. Может использоваться как для подземной, так и для открытой добычи.

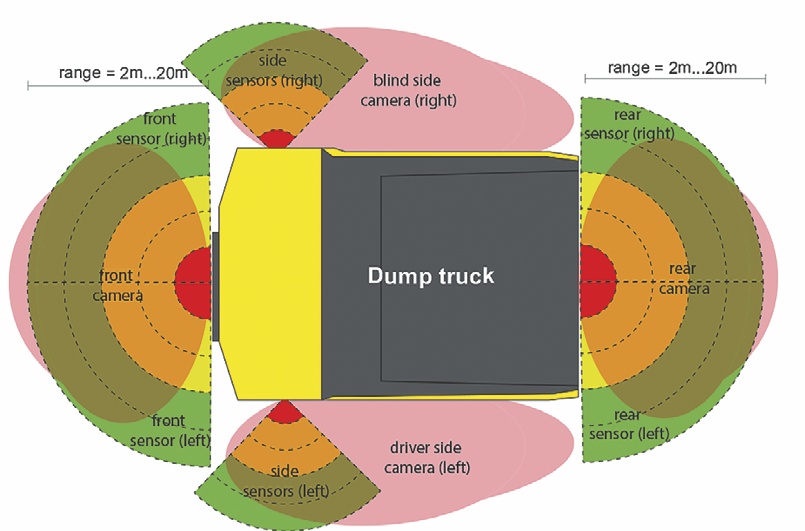
- Рис. 4 Пример системы радарного сканирования окружения от компании Orlaco
Преимущества:
– полная автономность каждой единицы техники;
– возможность контроля препятствий и отсутствия дороги;
– возможность комплексирования информации от радаров и камер;
– может применяться в качестве системы предотвращения наезда на препятствия.
Недостатки:
– возможность работы только в ближней зоне;
– высокая стоимость;
– работает только со сценариями Транспорт – Транспорт.
Примером такой системы может выступать продукт компании Hexagon Hxgn MineProtect (CAS), обеспечивающий 360-градусное обнаружение объектов при движении на любой скорости и в любых условиях, отображая информацию на дисплее в кабине оператора. Система слежения за объектами использует радиолокационные технологии для оценки положения и движения потенциальной угрозы, алгоритмы, основанные на оценке рисков, чтобы различать безопасные объекты и объекты, которые могут представлять угрозу столкновения. Дополнительно ситуационная осведомленность повышается за счет вычисления скорости и траектории движения по данным GPS.
- Рис. 5 Принцип работы системы предупреждения столкновений на основе радиосвязи
Системы на основе видеокамер. Как правило, являются дополнением к радарам или любой другой технологии, поскольку сильно подвержены воздействиям окружающей внешней среды (освещение, туман, загрязнение оптики и т.д.) и не обладают достаточной надежностью для самостоятельного применения. Могут использоваться как для подземной, так и для открытой добычи.
Системы, использующие радиочастотные диапазоны. Как правило, используется UWB (Ultra-Wide Band, сверхширокая полоса), а также UHF диапазон (Ultra high frequency, ультравысокие частоты). Система предназначена для работы по сценариям Транспорт – Транспорт, Транспорт – Человек. Принцип действия основан на обмене информационными сообщениями между всеми объектами, оборудованными системой в радиусе прямой видимости, а также с возможностью огибания рельефа местности. Определение расстояния осуществляется путем замера времени прохождения сигнала между несколькими источниками и применения метода трилатерации. Система может использоваться во всех сценариях и при любом виде добычи.
Преимущества:
– прямое взаимодействие машин и носимых устройств для персонала между собой;
– возможность использования на открытых и подземных горных работах, а также внутри зданий;
– высокая точность;
– расстояние работы до 70–250 м (в зависимости от условий).
В качестве иллюстрации применения данной технологии можно привести продукт компании RealTrac для предотвращения столкновений «Система Антинаезд». Контроль осуществляется в горизонтальной плоскости в радиусе 360° на расстоянии от одного до ста метров. В системе используется технология UHF (Ultra high frequency) для определения наличия техники или персонала за препятствиями или поворотом и технология BLE (Bluetooth Low Energy) для детектирования нахождения водителя внутри кабины и избежания фактора ложного срабатывания. Детектирование сближения осуществляется в автономном режиме как во время движения, так и во время стоянки транспорта. Система виртуально разделяет пространство вокруг транспортного средства на три зоны:
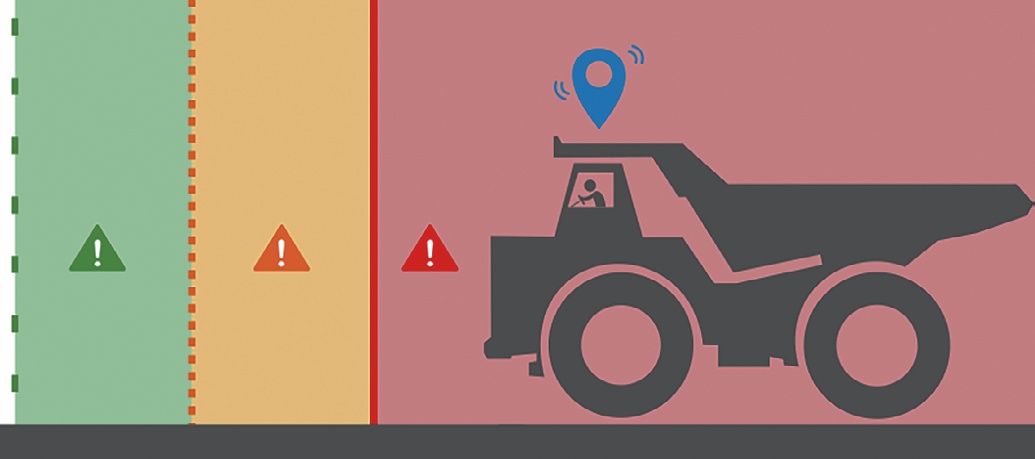
- Рис. 6 Зоны контроля опасных сближений
Зона «Внимание» – предупреждает работников о наличии техники на малом расстоянии. Служит для детектирования возможного опасного сближения и позволяет обратить внимание сотрудников на факт сближения с другим объектом. Зона «Опасность» – фиксирует опасное сближение и привлекает внимание работников. Служит для оповещения о возможной аварии.
Зона «Авария» – генерирует сигнал тревоги в условиях чрезвычайной ситуации или при экстремально опасном сближении.
В состав подобных систем, как правило, входят:
– радиомодули для размещения по периметру транспортных средств и предназначенных для детектирования других модулей и персональных тэгов;
– индикатор или монитор – устанавливаются внутри транспортного средства для обеспечения визуальной сигнализации факторов опасного сближения;
– бортовой вычислитель, который обеспечивает расчет направления и расстояния до других объектов;
– персональный тэг – носимое оборудование, предназначенное для обнаружения факторов опасного сближения персонала с карьерным транспортом.
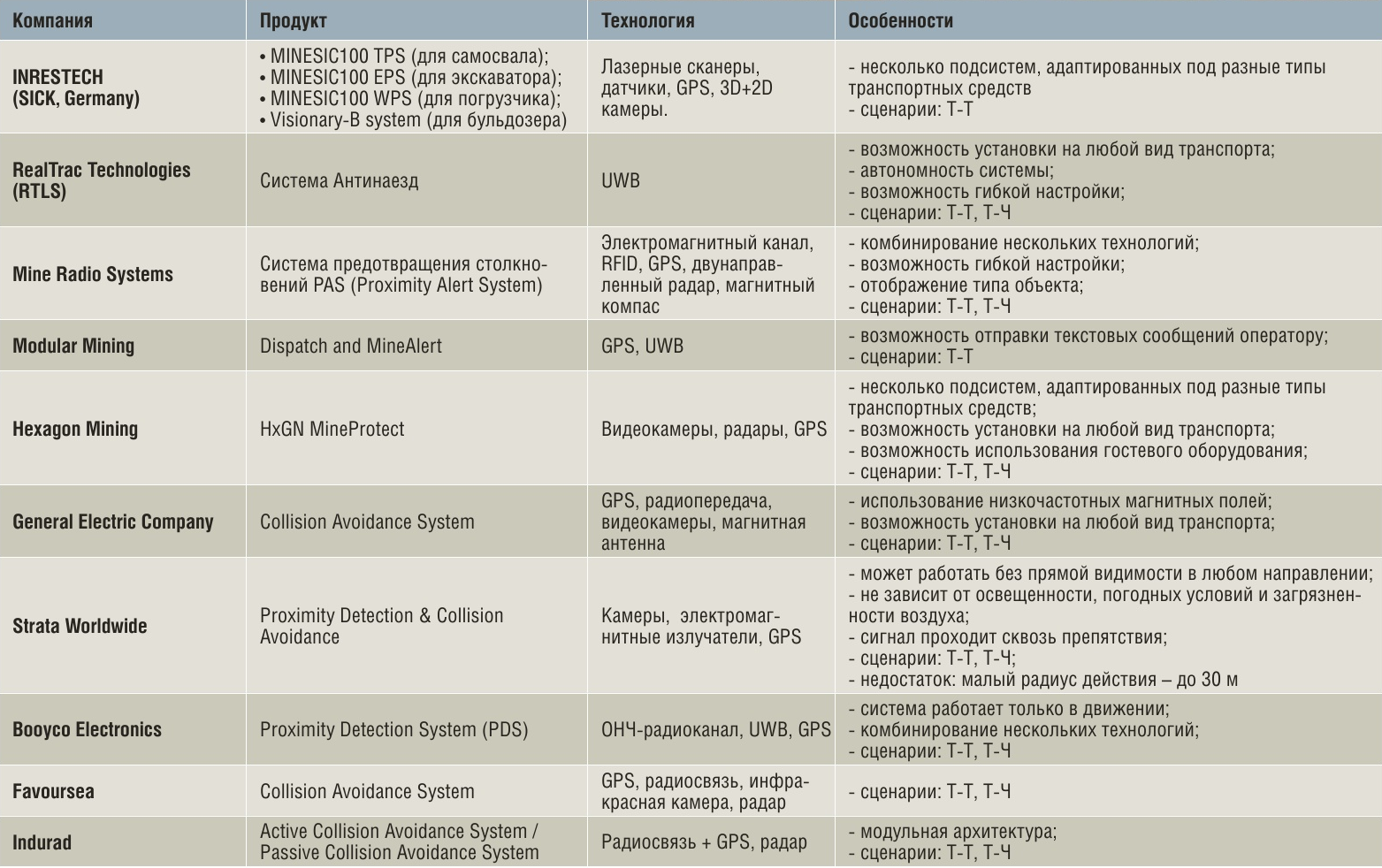
Общее сравнение наиболее применимых технологий, использующих радиочастотные диапазоны, отражено в таблице:

Рассмотренные технологии имеют свои преимущества и недостатки, поэтому в ситуациях, требующих повышенной надежности, необходимо применение комбинированных решений:
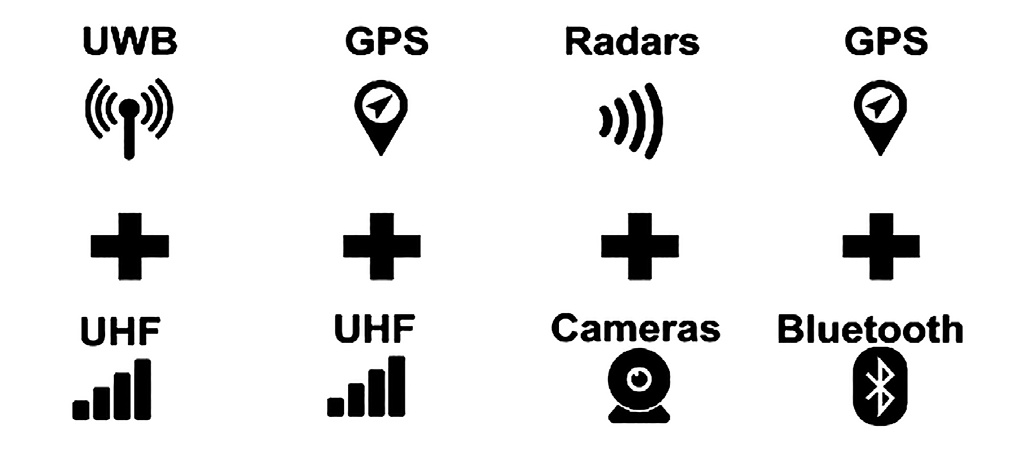
- Рис. 7 Возможные комбинации различных технологий для построения системы предупреждения столкновений
Для предприятий, оборудованных системой диспетчеризации, такой как АСУ ГТК «Карьер» (АО «ВИСТ Групп»), имеющей в своем составе систему спутниковой навигации, одной из эффективных комбинаций является UWB + GPS.
Данная комбинация имеет ряд преимуществ, таких как:
– низкая стоимость оборудования (за счет использования уже имеющейся инфраструктуры);
– высокая точность и дальность обнаружения, работа в любых погодных условиях;
– нелицензируемый радиочастотный диапазон.
Рассмотрим примеры технических решений по реализации системы предупреждения столкновений, представленных на рынке:
Помимо опасных сближений с карьерной техникой, угрозу жизни и здоровью людей на горном производстве несет их пребывание в зонах, характеризуемых возможным падением, обрушением, обсыпанием и другими факторами.
Автоматизация оперативного контроля и сигнализации о попадании в такую зону является связанной задачей обеспечения безопасности.
Такой контроль за возникновением опасных ситуаций и их предотвращение обусловливают появление на предприятиях новой роли – диспетчера промышленной безопасности, реализующего принцип «второй пары глаз» без отвлечения на непосредственные производственные операции. Его рабочее место на базе диспетчерской системы (АСУ ГТК) позволит агрегировать все возникающие предупреждения о рисках инцидентов для формирования оперативной картины промышленной безопасности предприятия.
Полноту диспетчерскому контролю придает мониторинг опасных состояний здоровья работников на производстве. Ряд таких состояний может не осознаваться работником, в связи с чем важно их оперативно выявлять и прекращать с помощью срочной медицинской помощи.
Вышеописанный набор задач успешно решается с помощью персональных носимых электронных устройств. При охвате контроля состояния здоровья такое устройство успешно реализуется в виде кистевого биометрического браслета с функциональностью:
– позиционирование на местности;
– контроль попадания в заранее размеченные опасные зоны;
– мониторинг вариативности сердечного ритма, сатурации крови;
– детекция резких перепадов высоты (падений);
– детекция длительного нахождения без движения;
– персональная идентификация при обнаружении карьерной техникой;
– срочный вызов диспетчера;
– резервный экстренный канал связи с диспетчером;
– оперативная отчетность в диспетчерскую систему.
Исходя из вышеизложенного можно сформулировать общие технические требования, предъявляемые к системе предупреждения столкновений и наездов на персонал:
1. Компоненты системы должны устанавливаться на все виды карьерной техники, обеспечивая максимальную легкость монтажа и демонтажа. Максимальное время установки для транспортного средства не должно превышать четырех часов (для карьерного самосвала грузоподъемностью 130–220 т командой из двух монтажников).
2. Система должна обеспечивать следующие режимы работы:
– обнаружение сближения Транспорт – Транспорт (V2V);
– обнаружение сближения Транспорт – Человек (V2P).
3. Система должна обеспечивать контроль сближения с объектами в режиме реального времени в радиусе 360° и дальности детектирования не менее 100 м в горизонтальной плоскости.
4. Детектирование сближения должно осуществляться на скорости до 60 км/ч.
5. Система должна иметь градацию зон по степени опасности в зависимости от расстояния и отмечаться на индикаторах различными цветовыми схемами. Размеры зон могут быть динамическими и зависеть от скорости и направления движения.
6. Для каждой зоны должны быть реализованы различные способы (источники) оповещения для дисплея оператора/носимого тэга – в зависимости от степени опасности.
7. Система должна обеспечивать минимальное количество ложных срабатываний.
8. Система должна быть расширяемой, иметь высокий модернизационный потенциал и обеспечивать возможность интеграции с системами диспетчеризации.
При выборе Системы предупреждения столкновений и наездов на персонал карьерной техникой следует опираться не только на стоящие в данный момент задачи по обеспечению заданного уровня безопасности на предприятии, но и на управление производственными процессами на предприятии.
Некоторые системы позволяют также получать данные о местоположении транспорта и персонала, интегрироваться с системами контроля усталости водителя. Вся получаемая информация может быть использована в сочетании с нарядной системой, что в свою очередь может стать первым шагом к внедрению на предприятии Многофункциональной Системы Безопасности (МФСБ), которая в общем случае должна обеспечивать:
– контроль состояния ведения открытых горных работ в соответствии с проектными решениями и календарным планом развития горных работ;
– контроль работы основного горнотранспортного оборудования;
– контроль геомеханических и сейсмических процессов;
– системы оповещения и определения местоположения оборудования и персонала;
– функции связи, в том числе с подразделением профессиональных аварийно-спасательных формирований;
– наличие других систем (подсистем) безопасности с учетом специфики конкретного предприятия.










