


Анализ и математическое моделирование системы определения местоположения персонала угольной шахты, построенной с применением сенсорной сети Часть 1.
- Насибуллина Т.В., Костенко М.В.
ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация - Горная Промышленность №4 / 2019 стр.126-132
![]() Резюме: Данная статья является первой частью из цикла работ по исследованию систем определения местоположения, применяемых в угольных шахтах. В рамках работы рассматриваются подходы к исследованию систем определения местоположения и выполняется оценка влияния внешних факторов на точность позиционирования объектов в системах, построенных с применением комплексных методов измерения. Испытания проводились на различных участках шахты (прямолинейных выработках, сопряжениях, поворотах), оснащенных оборудованием системы «SBGPS». Сначала проводились запланированные действия в шахте (расположение объектов позиционирования в определенных местах, перемещение по заданным маршрутам и прочее). После чего была произведена выгрузка «сырых» (без применения математической обработки) данных измерений расстояния по методу оценки ToF СШП-сигнала с сервера системы и выполнен их анализ с учетом реального расположения объектов позиционирования в различные моменты времени. В качестве объектов применялись устройства оповещения. В качестве узловых точек с известным местоположением, относительно которых проходит определение местоположения, использовались узлы сети передачи данных системы – базовые станции. Испытания показали высокую точность, а также устойчивость систем определения местоположения к многолучевому распространению и другим особенностям шахтной среды. Выполненный анализ позволил собрать необходимые данные для построения и исследования математической модели системы определения местоположения.
Резюме: Данная статья является первой частью из цикла работ по исследованию систем определения местоположения, применяемых в угольных шахтах. В рамках работы рассматриваются подходы к исследованию систем определения местоположения и выполняется оценка влияния внешних факторов на точность позиционирования объектов в системах, построенных с применением комплексных методов измерения. Испытания проводились на различных участках шахты (прямолинейных выработках, сопряжениях, поворотах), оснащенных оборудованием системы «SBGPS». Сначала проводились запланированные действия в шахте (расположение объектов позиционирования в определенных местах, перемещение по заданным маршрутам и прочее). После чего была произведена выгрузка «сырых» (без применения математической обработки) данных измерений расстояния по методу оценки ToF СШП-сигнала с сервера системы и выполнен их анализ с учетом реального расположения объектов позиционирования в различные моменты времени. В качестве объектов применялись устройства оповещения. В качестве узловых точек с известным местоположением, относительно которых проходит определение местоположения, использовались узлы сети передачи данных системы – базовые станции. Испытания показали высокую точность, а также устойчивость систем определения местоположения к многолучевому распространению и другим особенностям шахтной среды. Выполненный анализ позволил собрать необходимые данные для построения и исследования математической модели системы определения местоположения.
Ключевые слова: система определения местоположения, позиционирование, точность, угольная шахта, модель
Для цитирования: Насибуллина Т.В., Костенко М.В. Анализ и математическое моделирование системы определения местоположения персонала угольной шахты, построенной с применением сенсорной сети. Часть 1. Оценка влияния внешних факторов на точность определения местоположения в реальной системе. Горная промышленность. 2019;(4):126-132. DOI: 10.30686/1609-9192-2019-4-126-132
Информация о статье
Поступила в редакцию: 27.05.2019
Одобрена рецензентами: 19.06.2019, 12.07.2019
Принята к публикации: 21.07.2019
Информация об авторах
Насибуллина Татьяна Владимировна – начальник научно-технического отделения ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация.
Костенко Михаил Владиславович – инженер-электроник ООО Научнопроизводственная фирма «Гранч», г. Новосибирск, Российская Федерация.
Введение
Для обеспечения безопасности труда на угольных шахтах в составе многофункциональных систем безопасности (МФСБ) должны эксплуатироваться системы определения местоположения персонала. Требования к таким системам определены в ГОСТ Р 55154–20122. Современные системы определения местоположения строятся с применением различных методов и соответственно имеют различные характеристики. Очевидно, что широко распространенных на горнодобывающих предприятиях благодаря своей низкой стоимости систем контроля доступа становится недостаточно, поскольку их точность ограничивается определением зоны нахождения персонала в шахте, а о положении объектов между точками контроля в таких системах вообще ничего не известно. Производственные процессы угольной шахты требуют от систем определения местоположения непрерывного позиционирования персонала и транспорта под землей в реальном времени (Real-time location systems, RTLS) с максимальной точностью.
Такие системы являются программно-аппаратным комплексом и следует рассматривать параллельное развитие их аппаратного обеспечения (различные физические принципы определения положения, непосредственное развитие отдельных компонентов, например электроники, используемой в данных системах) и математических методов определения положения объектов в закрытых пространствах. Сегодня в основном применяют два типа методов определения положения: по данным направления на позиционируемый объект относительно базовой станции (БС) – ангуляция; по расстоянию между ними – латерация. При этом алгоритмы имеют особенности в зависимости от применяемого в системе физического принципа. Так, для систем позиционирования в угольных шахтах характерно наличие особенностей распространения сигналов в силу наличия препятствий и отражающих поверхностей. Также борта выработок могут служить граничными условиями при расчете положения объекта. В части аппаратного обеспечения в современных системах применяют сенсорные сети, построенные с применением технологий Wi-Fi (IEEE 802.11), Bluetooth (IEEE802.15.1), ZigBee (IEEE802.15.4), специализированных протоколов передачи данных (Chirp Spread Spectrum – CSS и др.). Одним из перспективных направлений является определение местоположения при помощи сверхширокополосных (СШП) сигналов. В данной тематике ведутся работы по различным направлениям: применение системы для решения определенных задач, таких как определение длины шага [1]; тестирование систем в сложных условиях, например, на промышленных предприятиях [2]; исследование и разработка методов обработки информации применительно к СШП-диапазону и техникам определения расстояния, используемым с ним [3]; изучение устойчивости метода к различным внешним воздействиям и применение в определенных сценариях, например при быстром перемещении объекта [4].
Проектирование и исследование сложных технических систем, в особенности тех, что предназначены для применения на опасных производственных объектах, часто является затруднительным, поскольку свободного доступа на такой объект у исследователя-испытателя, как правило, нет. Более безопасным подходом является имитационное моделирование различных параметров таких систем, а также сценариев их использования. Для построения наиболее адекватной математической модели системы определения местоположения требуется анализ данных удаленного мониторинга состояния реально эксплуатирующихся систем. В данной статье представлены результаты исследования работы системы позиционирования в составе МФСБ «SBGPS» производства ООО НПФ «Гранч» (г. Новосибирск). В данной системе реализован комплекс различных методов определения местоположения, и оптимальные характеристики достигаются именно благодаря такому подходу. В работе же приводится анализ экспериментальных данных, полученных с применением в исследуемой системе метода расчета местоположения на базе измерения времени пролета (ToF) СШП-сигнала, при наиболее характерных сценариях эксплуатации системы в угольной шахте. Данный метод позволяет достичь точности определения местоположения в несколько сантиметров на поверхности и до ±1 м в условиях закрытого пространства [5; 6], а также хорошо подходит с физической точки зрения для применения в угольных шахтах благодаря таким особенностям, как устойчивость к многолучевому распространению, которое сильно ухудшает работу большинства методов, основанных на распространении радиосигналов.
Исследование и анализ реальной системы
Параметры системы: точность определения местоположения
В качестве основной характеристики системы позиционирования, как правило, рассматривается точность определения местоположения. Имеет смысл остановиться на терминологии в данной области.
Термин «точность» широко используется и в других областях, он является ключевым для метрологии. Так, в ряде стандартов можно найти определение точности. В настоящее время используется стандарт ГОСТ Р ИСО 5725-1–2002, в котором определения соответствуют документу ISO 5725A1:1994 «Accuracy (trueness and precision) of measurement methods and results. Part 1: General principles and definitions». В данных документах точность (accuracy) определяется как степень близости результата измерений к принятому опорному значению3. Учитываются как случайная, так и статистическая погрешности, которым обычно соответствуют термины прецизионность (precision) и правильность (trueness). В англоязычной литературе также различают термины «calculated position» и «measured position». Первый обычно относится к отображаемому пользователю системы местоположению после применения различных методов математической обработки измеренных значений от разных датчиков. Второй же предполагает «сырые» данные с датчиков до математической обработки (различных способов фильтрации, статистической обработки и прочих методов).
Интересен к рассмотрению ПНСТ 17-20144, несмотря на окончание срока его действия в 2018 г., где используется термин «ошибка наблюдения», которому дано следующее определение: «расхождение между положением работника в зоне наблюдения и отображением его положения на автоматизированном рабочем месте программно-технического комплекса системы наблюдения». В текущей классификации данного документа лучший класс по точности должен обеспечивать позиционирование с ошибкой наблюдения не более ±1 м. Термин «ошибка наблюдения» в данном случае включает в себя множество факторов, потому как означает расхождение между действительным положением работника и отображаемым на автоматизированном рабочем месте системы наблюдения. Таким образом, даже некачественный вид отображения информации при правильном измерении (например, слишком малый размер изображения, где оператор будет не в состоянии визуально различить изменения в положении работника с достаточной точностью) повлияет на данный параметр.
ГОСТ Р 55154–20125 в отношении системы позиционирования на шахте как составляющей МФСБ предписывает непрерывно в реальном времени определять местонахождение каждого работника с разрешением в ±20 м. В данном случае также можно обратить внимание на используемый термин «разрешение», так как, как правило, он обозначает разницу между двумя ближайшими значениями, отображаемыми средством измерения, при этом точность может быть недостаточной для достоверного определения изменения наименьшего деления.
Обычно в контексте позиционирования под точностью понимают отклонение определяемого системой местоположения от действительного. Также при оценке точности зачастую используют оценку по определенному проценту измерений, для чего нередко выбирают значение, близкое к двум сигмам при нормальном распределении – 95%. В стандартах касательно RTLS не указывается метод расчета местоположения, поэтому данное значение остается на усмотрение автора конкретной работы, и в случае, когда оно не указано и не оговаривается метод обработки данных для получения значения точности, понимание характеристик конкретной системы оказывается затруднительным. В англоязычной литературе также различают термины «calculated position» и «measured position». Первый обычно относится к отображаемому пользователю системы местоположению после применения различных методов математической обработки измеренных значений от разных датчиков. Второй же предполагает «сырые» данные с датчиков до математической обработки (различных способов фильтрации, статистической обработки и прочих методов).
В системе «SBGPS» период обновления данных о местоположении персонала и транспорта составляет не более 5 с, а количество измерений ежесекундно достаточно для того, чтобы выбрать из них статистически достоверные. Итак, в рамках данной работы под «точностью» будем понимать отклонение определяемого (по методу ToF) исследуемой системой местоположения объектов от действительного.
Анализ факторов, влияющих на параметры системы
Для моделирования системы при оценке факторов, влияющих на ее характеристики, следует учесть множество нюансов: физический принцип работы системы и влияющие на него факторы окружающей среды, ее архитектуру, алгоритмы ее работы. При этом эти области могут пересекаться. Например, расчет размещения БС с учетом распространения сигнала в конкретных условиях с учетом имеющихся препятствий. Алгоритмы обработки данных (определенные методы фильтрации, корректировки поступающих значений и т.д.) также часто связаны с физическим принципом и реализованным на его основе математическим способом определения расстояния (такими как RSSI, ToF, TDoA) и выбранным алгоритмом построения сети (количество устройств в области видимости, возможности размещения БС в пространстве и учет используемого количества измерений).
В исследуемой системе используется метод оценки ToF СШП-сигнала, на точность которого могут повлиять следующие физические параметры:
- мощность сигнала (как результат увеличения расстояния между объектами системы, влияния диаграммы направленности, некоторых препятствий);
- электротехнические характеристики модуля, которым оснащается позиционируемый объект (например, напряжение питания, режим работы и т.д.);
- прямая видимость (влияние препятствий, не пропускающих прямой сигнал и приводящих к оценке расстояния по отраженному – с большим пройденным расстоянием);
- дрейф часов;
- температура окружающей среды.
Следует выделить параметры, зависящие от алгоритма работы системы, метода построения инфраструктуры, например:
- количество учитываемых при позиционировании осей;
- время проведения измерения;
- количество объектов в зоне связи;
- расположение элементов инфраструктуры и область перемещения позиционируемых объектов.
Отдельные физические параметры зачастую могут представляться в виде достаточно простых математических выражений и наибольшую сложность здесь представляет компоновка различных параметров для получения результирующего значения. Например, для вычисления расстояния по временным меткам (характеризуют моменты отправки/приема сигналов) используются операции сложения, вычитания и деления [7].
А влияние температуры может быть представлено в виде
X = n · T ,
где X– ошибка в см, n – константа, T – температура в градусах Кельвина.
В случае анализа ситуаций, требующих моделирования распространения сигнала (например, многолучевое распространение, имеющее значительное влияние в шахтной среде) могут использовать различные модели – формула передачи Фрииса, модель электромагнитного волновода [8].
Можно встретить публикации, рассматривающие систему определения координат метки в качестве системы массового обслуживания для проведения имитационного моделирования в пакете Anylogic и оценки различных вариантов организации сети сенсоров [9]. Для представления пространства, в котором находится позиционируемый объект, нередко используются графы [10]. Для определения местоположения в закрытых пространствах характерна ситуация, когда можно уточнять положение объекта исходя из конфигурации среды и невозможности нахождения в некоторых точках. Похожие механизмы используются в автомобильных навигаторах для расположения авто в области дороги, алгоритмы определяются как «map matching». Для типичных методов определения положения триангуляцией и трилатерацией используются тригонометрические формулы и матричное исчисление [11]. Обычно предполагается нормальное распределение для результатов измерений системы позиционирования, которые подвергаются дальнейшей обработке и фильтрации. Следовательно, на данном этапе обращаются к теории вероятностей и математической статистике. Понятно, что в определенной мере такие подходы можно применить и к моделированию шахтных систем определения местоположения.
Одним из новых трендов в обработке данных является применение нейронных сетей [12; 13]. Для этого в определённых условиях экспериментально собираются наборы данных для тестирования алгоритмов. На данных наборах можно тестировать и более традиционные методы обработки, так как они позволяют оценивать отклонение вычисленной позиции от реальной. Ожидается, что, собирая дополнительные данные о сигнале, нейронные сети позволят учитывать особенности распространения сигналов в сложной среде – такие как многолучевое распространение, расположение объекта вне прямой видимости (NLOS), большое количество отражающих и поглощающих поверхностей – что с трудом поддается обработке другими методами.
Результаты экспериментальной оценки
Испытания проводились на различных участках шахты, оснащенных оборудованием системы «SBGPS»: прямолинейных выработках, сопряжениях, поворотах. Общий порядок испытаний был следующим: проводились запланированные действия в шахте (расположение объектов позиционирования в определенных местах, перемещение по заданным маршрутам и прочее), после чего проводилась выгрузка «сырых» (без применения какой-либо математической обработки) данных измерений расстояния по методу оценки ToF СШП-сигнала с сервера системы и проводился их анализ с учетом реального расположения объектов позиционирования в различные моменты времени. В качестве объектов применялись устройства оповещения (УО), которыми были снабжены испытатели. В качестве узловых точек с известным местоположением, относительно которых проходит определение местоположения, использовались узлы сети передачи данных системы – БС. Линейный алгоритм расчета координат, применяемый в системе, позволяет размещать элементы инфраструктуры с наименьшей частотой с сохранением непрерывного позиционирования. На рис. 1 представлена схема подземного участка системы.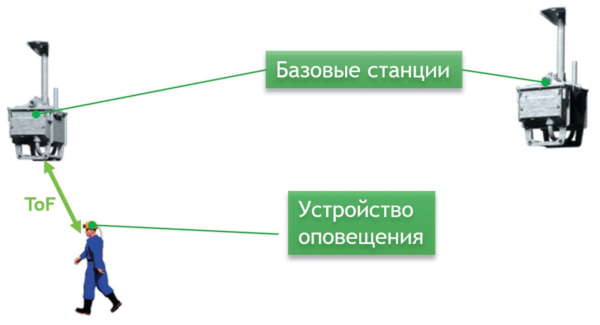
Рис. 1 Схема эксперимента Fig. 1 Test set-up
Экспериментальная оценка эффективности метода при неподвижном положении объекта позиционирования показала, что на результат определения местоположения оказывает влияние ориентация УО в пространстве. Примеры набора данных показаны на рис. 2. Так, повышенный разброс значений для УО 3 на рис. 2 связан с намеренными изменениями положения головы испытателя во время испытания (УО расположено на каске), приводящими к изменению расположения позиционируемого УО в пространстве, а также с влиянием диаграммы направленности антенны, применяемой в УО. Соответственно данные, полученные исследуемым методом, требуют некоторой математической обработки и уточнения значениями, полученными альтернативными методами. В системе «SBGPS» в качестве источника данных для уточнения конечного значения положения человека могут использоваться данные встроенного в УО акселерометра.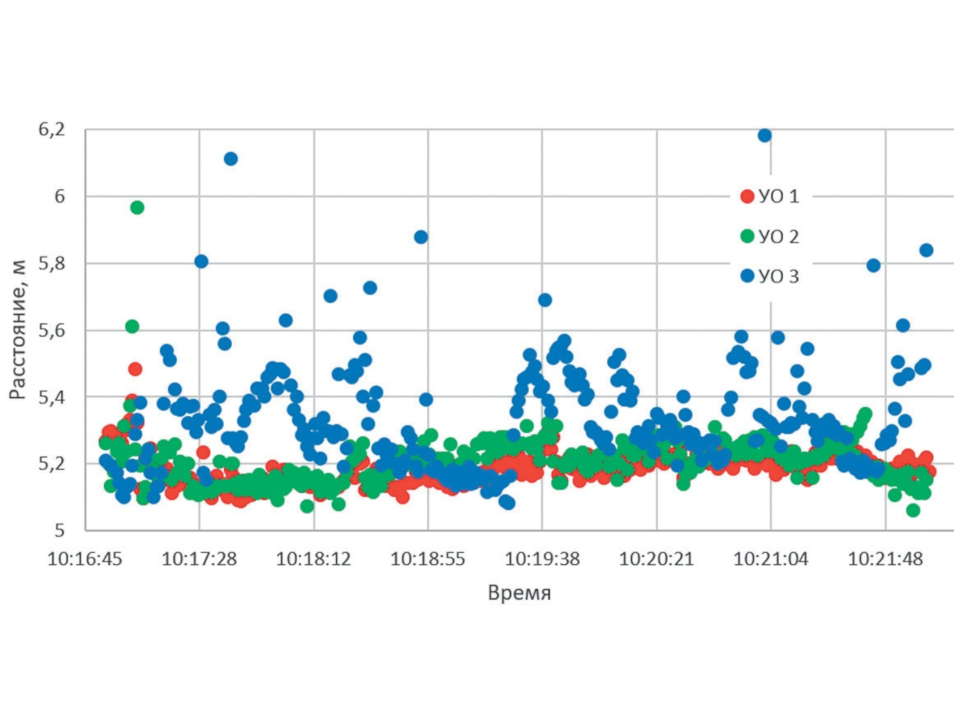
Рис. 2 Измерение расстояния при положении испытателя в одной точке с изменением положения устройства оповещения (для трех устройств)
Fig. 2 Distance measurement with the fixed test operator position and changing positions of the caplamps (three units)
На рис. 3 показаны данные эксперимента, в котором три УО перемещались вблизи места установки БС, двигаясь с двух сторон БС в течение испытания, скорость перемещения поддерживалась испытателями по возможности постоянной. Стоит отметить, что минимальное измеренное расстояние отличное от 0, так как при перемещении УО находились на отличной от положения БС высоте и ширине выработки – при некоторой интерпретации результатов может привести к ошибочным выводам.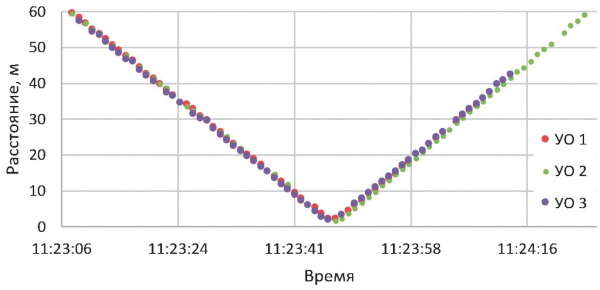
Рис. 3 Измерение расстояния при равномерном перемещении трех устройств оповещения через место установки базовой станции
Fig. 3 Distance measurement with uniform movement of the three caplamps through the base station position
Через точки, соответствующие отдельным измерениям, легко можно провести линию, что и ожидалось от равномерного перемещения с высокой точностью определения местоположения.
При снятии данных, показанных на рис. 4, во время перемещения УО была изменена скорость движения испытателя. Эксперимент показал наличие возможности отличить перемещения на различных скоростях с достаточно высокой точностью: скорость испытателя изменилась с 1,55 до 1,03 м/с. Точность определения скорости в данном случае будет зависеть от количества измерений, по которым она вычисляется. При оценке скорости по двум соседним точкам значения варьировались – расчетное отклонение одной точки от реального положения составляет ±0,25 м/с.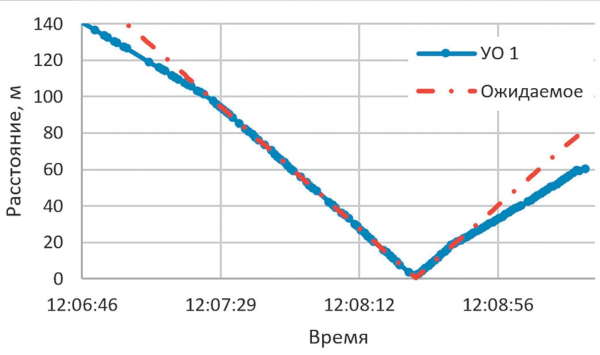
Рис. 4 Измерение расстояния при перемещении устройства оповещения с изменением скорости
Fig. 4 Distance measurement with the caplamps moving with a changing velocity
На рис. 5 показаны данные при перемещении испытателя с остановками. Как видно, имеющаяся точность позволяет хорошо различать изменения в характере перемещения и явно видны моменты остановок. Можно отметить, что переходы между неподвижным положением и перемещением происходят плавно, что соответствует действительному характеру движения человека и подтверждает высокую точность определения местоположения.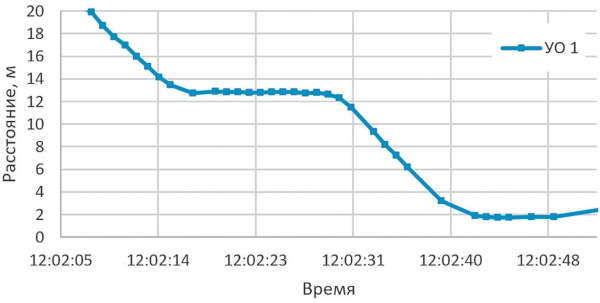
Рис. 5 Измерение расстояния при перемещении устройства оповещения с остановками
Fig. 5 Distance measurement with the stop-and-go movement of the caplamps
Среди всех проведённых экспериментов можно отметить общие положения. На определение местоположения объектов в шахте по методу ToF оказывает значительное влияние отсутствие прямой видимости (аналогичные результаты можно встретить в других исследованиях). При этом не столько снижается точность (происходит увеличение измеренного расстояния в соответствии с увеличением времени распространения сигнала в силу увеличения пройденного расстояния при переотражении, замедлении при преодолении препятствий и ослаблении в обоих случаях), сколько увеличивается количество неуспешных попыток измерения в силу отсутствия канала связи. Данная особенность накладывает значительные ограничения на инфраструктуру, приводя к необходимости нахождения УО в прямой видимости хотя бы одной БС для стабильного обеспечения в системе функции точного позиционирования. С учетом сложности фиксации точного расстояния испытателей от БС для каждого момента времени при перемещениях, можно сказать, что движение не оказывает заметного влияния на работу системы, что также согласуется с результатами аналогичных испытаний других исследователей. Перемещение на повороте теоретически должно давать дополнительную ошибку в силу отклонения от линейного перемещения между БС.
Тем не менее, при испытаниях данная ошибка проявляется крайне слабо в силу достаточно большого радиуса поворота и расположения БС в прямой видимости. Данная ошибка также может быть устранена при учете расположения инфраструктуры системы на уровне внесения корректировок в алгоритм определения местоположения. Для сопряжений стоит отметить, что при некоторых положениях может сохраняться неопределенность выработки, в которой находится УО – при сопоставимом или меньшем, чем точность, расстоянии до разделения выработок. На выбор текущей выработки также может оказать значительное влияние высота подвеса БС в случае её расположения непосредственно на сопряжении (когда высота не учитывается при расчете конечной позиции).
Тем не менее, с учетом отмеченных выше результатов экспериментов, можно утверждать, что в исследуемой системе точность определения расстояния методом ToF для 95% измерений с учетом влияния различных факторов, как правило, не хуже +-0,5 м, а для ситуаций со стабильным состоянием УО и окружающей среды может достигать величины, сравнимой с применением данного метода на поверхности – +-0,15 м. Однако нужно сказать, что в реальных условиях, когда производственный процесс в шахте идет независимо от функционирования системы позиционирования, поддерживать оптимальные условия для работы метода весьма сложно. Поэтому под влиянием большого количества внешних факторов, оказывающих влияние на работу системы, в среднем точность определения местоположения персонала и транспорта в системе «SBGPS» методом ToF составляет порядка +-2 м (согласно экспериментальным данным).
Заключение
Выполненный в работе анализ и экспериментальная оценка влияния внешних факторов на точность определения местоположения в реальной системе позиционирования показали, что в общем случае значительное влияние на работу таких систем могут оказывать:
- время измерения и скорость обновления данных в ПО верхнего уровня;
- геометрия пространства горных выработок и наличие препятствий;
- эффект многолучевого распространения радиосигнала в выработках шахты;
- расстояние между опорными узлами и общая архитектура системы;
- аппаратное обеспечение системы;
- особенности метода расчета местоположения объекта и др.
Экспериментальная проверка проводилась на базе оборудования системы «SBGPS» производства ООО НПФ «Гранч», где определение местоположения объектов (персонал, транспорт, горно-шахтное оборудование) производится с применением гибридного метода, включающего оценку ToF СШП-сигнала.
Показана эффективность метода ToF в условиях шахты для точного определения расстояния, подтверждены декларируемые производителем исследуемой системы параметры точности позиционирования (3±1) м. Следует отметить устойчивость системы к ряду внешних воздействий, в том числе к эффекту многолучевого распространения сигнала, являющемуся особенностью шахтной среды. Показана реальная возможность создания системы подземного определения местоположения персонала с точностью не хуже ±2 м, проанализированы некоторые необходимые для этого условия. Такая высокая точность позволит решать комплекс задач обеспечения безопасности работ в шахте и задач по управлению технологическими процессами горнодобывающего предприятия. К примеру, на сегодняшний день система «SBGPS» совместно с программным комплексом «Вентиляция» способна в ручном и автоматическом режиме управлять процессом вывода людей из шахты при аварии. Кроме того, показанная экспериментально возможность точного определения скорости перемещения объектов, используется в определении факта проезда человека на конвейере, что позволяет своевременно среагировать и предотвратить потенциально опасную ситуацию.
Класс навигационных задач требует не только высокой точности определения местоположения персонала под землей, но и стабильности работы системы, ее устойчивости к аварийным условиям. Исследуемая система обладает всеми указанными характеристиками. Имеет смысл выделить отдельно эффективность линейного алгоритма определения местоположения в шахте, позволяющего создать систему позиционирования с наименьшим количеством элементов инфраструктуры. При этом некоторые вносимые погрешности в перспективе могут быть компенсированы путем учета расположения элементов инфраструктуры.
Актуальной является задача построения математической модели системы определения местоположения, поддерживающей различные методики позиционирования и обладающей широким перечнем параметров. Такая модель позволит более гибко подходить к вопросам усовершенствования систем определения местоположения для опасных производственных объектов, упростит задачи проектирования и эксплуатации таких систем. В дальнейшем планируется использовать собранные в результате проделанных экспериментов данные, а также результаты проведенного анализа для построения такой модели, и оценить на базе модели существующие возможности по улучшению характеристик данных систем.
Список литературы
1. Dіez L.E., Bahillo A., Otim T., Otegui J. Step Length Estimation Using UWB Technology: A Preliminary Evaluation. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533731
2. Schroeer G. AReal-Time UWB Multi-Channel Indoor Positioning System for Industrial Scenarios. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533792
3. Perakis H., Gikas V. Evaluation of Range Error Calibration Models for Indoor UWB Positioning Applications. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533755
4. Risset T., Goursaud C., Brun X., Marquet K., Meyer F. UWB Ranging for Rapid Movements. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533820
5. Костенко М.В., Зотов И.А. Применение модулей DWM1000 для системы позиционирования в шахте. В: 1st Russian National Conference Nmst – 2016, Session Iii, June 26–29, 2016, Sedova Zaimka. Новосибирск; 2016. С. 148–152.
6. Barua B., Kandil N., Hakem N. On performance study of TWR UWB ranging in underground mine. In: 2018 Sixth International Conference on Digital Information, Networking, and Wireless Communications (DINWC), Beirut, April 25–27, 2018, Lebanon. Beirut, 2018, pp. 28–31. Available at: https://ieeexplore.ieee.org/document/8356990/ [Accessed: 30.10.2018].
7. Yavari M., Nickerson B. G. Ultra Wideband Wireless Positioning Systems. University of New Brunswick Fredericton, 2014. Available at: https://thetoolchain.com/mirror/dw1000/uwb_wireless_positioning_systems_technical_report.pdf [Accessed: 30.10.2018].
8. Fink A., Beikirch H. MineLoc – Personnel Tracking System for Longwall Coal Mining Sites. IFAC(PapersOnLine. 2015;48(10):215–221. DOI: 10.1016/j.ifacol.2015.08.134
9. Москаленко Т.А., Киричек Р.В. Методы позиционирования робототехнических систем внутри помещения на базе телекоммуникационных технологий. Информационные технологии и телекоммуникации. 2016;4(1):37–45. Available at: https://www.sut.ru/doci/nauka/review/20161/37-45.pdf [Accessed: 30.10.2018].
10. Burgess T., Metzler B., Ettlinger A., Neuner H.-B. Geometric Constraint Model and Mobility Graphs for Building Utilization Intelligence. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533726
11. Gholami M.R. Positioning Algorithms for Wireless Sensor Networks. Gothenburg, Sweden; 2011. Available at: https://publications.lib.chalmers.se/records/fulltext/138669.pdf [Accessed: 30.10.2018].
12. Feigl T., Nowak T., Philippsen M., Edelhдuвer T., Mutschler C. Recurrent Neural Networks on Drifting Time-of-Flight Measurements. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533813
13. Niitsoo A., Edelhдuвer T., Mutschler C. Convolutional Neural Networks for Position Estimation in TDoA-Based Locating Systems. In: 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Nantes, France, Sept. 24–27, 2018. DOI: 10.1109/IPIN.2018.8533766










