Т.В. Насибуллина, А.В. Новиков, К.В. Паневников, И.В. Писарев ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация Горная Промышленность №1 / 2020 стр. 127-131
Резюме: В статье рассмотрены методы передачи данных работы внутришахтного транспорта и самоходных механизмов на пульт горного диспетчера (верхний уровень). Показано, что распространение получают технологии, включающие в своем устройстве сочетание беспроводных и кабельных каналов связи. При этом выделяются два основных направления: дискретные методы на основе считывателей информации с движущихся транспортных средств и методы непрерывной передачи данных с транспортных средств во время движения в подземную инфраструктуру связи – с последующей доставкой по кабельной линии на верхний уровень. Особое внимание уделено методу непрерывной передачи информации c дизель-гидравлических локомотивов в угольных шахтах, основанному на применении системы позиционирования «SBGPS». Сделано заключение, что данный метод может быть применен в рудной шахте для мониторинга параметров транспортных средств и их местоположения при условии построения инфраструктуры связи системы «SBGPS».
Для цитирования: Насибуллина Т.В., Новиков А.В., Паневников К.В., Писарев И.В. Рудник – позиционирование и мониторинг транспортных средств. Горная промышленность. 2020;(1):127-131. DOI: 10.30686/1609-9192-2020-1-127-131.
Информацияостатье
Поступила в редакцию: 20.01.2020
Поступила после рецензирования: 03.02.2020
Принята к публикации: 10.02.2020
Информацияобавторах
Насибуллина Татьяна Владимировна – начальник научно-технического отделения, ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация, e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Новиков Александр Владимирович – кандидат технических наук, директор по внедрению, ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация, e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Паневников Константин Владимирович – заместитель директора по внедрению, начальник отдела анализа и внедрения, ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация, e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Писарев Игорь Валериевич – начальник группы проектирования и создания АСУТП ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация, e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Введение
На подземных работах в угольном и горнорудном производствах получают развитие автоматизированные системы управления (АСУ), предназначенные для контроля за работой транспортных средств (ТС) – внутришахтного транспорта и самоходных механизмов. Такие системы строятся, как правило, с учетом (или на основе) систем позиционирования. Горняки решают задачу не только по подсчету количества перевозимой горной массы, но и по эффективному использованию ТС. Для современного предприятия мало знать число рейсов, выполненных каждой единицей техники, – контролируются скоростной режим, наличие и причины простоев, своевременность и качество технического обслуживания, оптимизируются в целом режимы эксплуатации. Такому подходу к использованию ТС способствует тот факт, что, по сути, все современное оборудование данного назначения оснащено датчиками параметров работы и способно накопить в своем устройстве (на борту) поступающую информацию. Следующий шаг, который надо сделать горнякам, заключается в том, чтобы решить задачу передачи данных на верхний уровень – на пульт горного диспетчера (начальника смены) – с целью оперативного наблюдения за процессами добычи полезного ископаемого и проходки новых выработок, исходя из контроля и анализа грузоперевозок.
Для передачи данных получают распространение1 методы, основанные на применении беспроводных (радио) каналов связи. Наиболее известные варианты: первый – съем информации при приближении ТС к стационарным считывателям, устанавливаемым в узловых местах (устье, сопряжение, пересечение, рудоспуск и т.п.) горных выработок, и второй – передача информации по беспроводному каналу в подземную инфраструктуру связи непрерывным потоком по мере движения ТС в выработках.
Цель настоящей работы – рассмотреть особенности известных технологий передачи из шахты параметров работы ТС, определить наиболее эффективные и сформулировать направления их развития.
Зональныйметодсприменениемсчитывателей
Методика съема информации с движущегося ТС в условиях работы системы позиционирования с зональным принципом определения местоположения объектов наблюдения (персонала, ТС) предусматривает применение комбинации беспроводных видов связи с проводными.
При этом ТС по радиоканалу передает с бортового устройства данные о технических параметрах (скорость движения, давление масла двигателя, расход топлива, контроль массы груза и др.) на приемное устройство считывателя при приближении к нему на расстояние 25–60 м (параметр определяется конструктивными особенностями АСУ). Далее данные доставляются по кабельной линии (излучающий или оптоволоконный кабели) на верхний уровень (сервер, АРМ оператора), где обрабатываются и отображаются в соответствующей форме.
В качестве приемников информации служат считыватели (RFID-технология в диапазоне частот 400–433 МГц; стандарт IEEE 802.15.4 на частотах 2,4 ГГц) или точки доступа Wi-Fi (стандарт 802.11b/g/n на частоте 2,4 ГГц). В этих методах информация о местоположении ТС согласуется строго с местонахождением считывателей, а данные о работе ТС поступают на верхний уровень только при его нахождении в зоне действия приемного устройства считывателя, то есть дискретным образом. Причем дискретность носит сугубо непериодический характер, определяющийся схемой расстановки считывателей, наложенной на схему шахты, – протяженностью участков горных выработок с учетом их параметров и назначения. Координаты местоположения ТС фиксируются (определяются) по свойственной для зонального метода точности позиционирования: «до участка горной выработки». Данные телеметрии передаются на верхний уровень неритмично и, более того, некоторые события внутри зон между считываниями теряют свою актуальность, поскольку не согласуются с координатами местоположения ТС, что является очевидным недостатком метода.
ПередачапараметровТСврежимереальноговремени
Теоретические предпосылки. Первоначально следует принять допущение, что под режимом реального времени понимается режим непрерывной (периодичность обновления информации не более 5 с) передачи данных на пульт горного диспетчера (АРМ оператора) с отображением координат местоположения ТС. Для реализации данного метода в горных выработках шахты (угольная, рудная) создается информационная сеть – подземная инфраструктура беспроводной связи, характеризующаяся наличием сплошного радиополя. В качестве узлов связи применяются базовые станции. Между узлами информационной сети реализуется беспроводная связь. Мобильные индивидуальные устройства позиционирования персонала и смонтированные в (на) ТС специальные устройства (контроллеры) также связываются с узлами информационной сети по радиоканалу. Связь подземной инфраструктуры с верхним уровнем – с сервером и АРМ оператора – выполняется по волоконно-оптическим линиям связи (ВОЛС).
Как показывает анализ существующих на рынке РФ предложений, данная технология получает распространение по мере продвижения на горные объекты систем позиционирования соответствующего конструктивного исполнения [1]. Принимая во внимание практическую ценность получаемой на верхнем уровне информации об эксплуатируемых ТС, следует ожидать развития данной технологии.
Применение системы позиционирования в технологических целях. Ранее [2] было показано, что в числе систем, имеющих конструктивную близость, интерес представляет система «SBGPS» в силу ее функциональности и технических характеристик. Отличительные свойства системы: высокая точность определения местоположения персонала и ТС, наличие непрерывной связи между горным диспетчером и работниками в шахте, высокая пропускная способность подземной инфраструктуры связи, выходящая далеко за пределы задач позиционирования и аварийного оповещения, и другое.
В данной системе инфраструктура связи строится на оптимальном сочетании беспроводных каналов связи с кабельными (на основе ВОЛС, преимущественно). Достигнутый потенциал каналов (скорость передачи информации):
– беспроводной – до 100 Мбит/с;
– ВОЛС – до 1 Гбит/с.
Важным, как сообщалось, свойством данной системы является сохранение ее работоспособности при потере сетевого электропитания узлами информационной сети, обусловленное применением встроенных резервных источников питания с аккумуляторными батареями (АКБ).
Первые практические результаты по приему и передаче параметров работы ТС на верхний уровень с использованием технических устройств системы «SBGPS» получены с дизель-гидравлическими локомотивами (ДГЛ), работающими в угольных шахтах. Для этих целей разработан и применен специальный контроллер GAL (контроллер), общий вид которого и технические характеристики показаны на рис. 1.
Рис. 1 Контроллер GAL: а – вид общий; б –технические характеристикиFig. 1 GAL controller: a – general view; b – technical characteristics
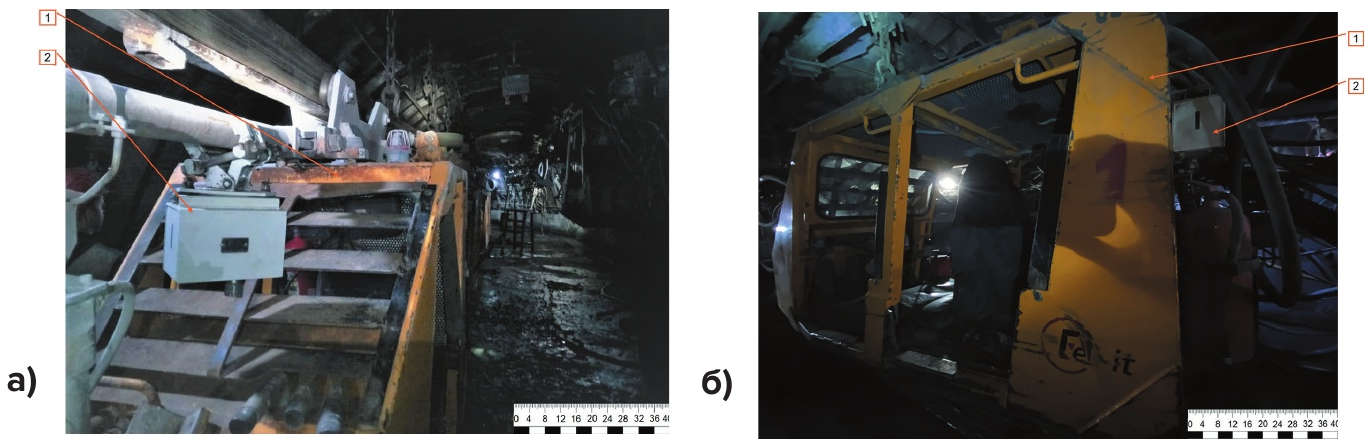
Контроллер выполнен в стальном корпусе с внешними конструктивными элементами, позволяющими механически закреплять его на узлах (отсеках) ДГЛ (рис. 2).
Рис. 2 Контроллер GAL на ДГЛ в шахте: а) на сцепной тяге между кабиной машиниста и моторным отсеком: 1 – кабина ДГЛ; 2 – контроллер GAL; б) на задней стенке кабины машиниста: 1 – кабина ДГЛ; 2 – контроллер GALFig. 2 GAL controller on a diesel-hydraulic locomotive in the mine: a) on a coupling rod between the driver's cabin and the engine compartment: 1 – dieselhydraulic locomotive cabin; 2 – GAL controller; b) on the rear wall of the driver's cabin: 1 – diesel-hydraulic locomotive cab; 2 – GAL controller
Контроллер получает питание от бортовой сети ДГЛ, а при потере сетевого питания автоматически переходит на работу от АКБ.
Прием контроллером информации с ДГЛ (0,8–1,2 Кбит/с) ведется непрерывно – в движении и при остановках.
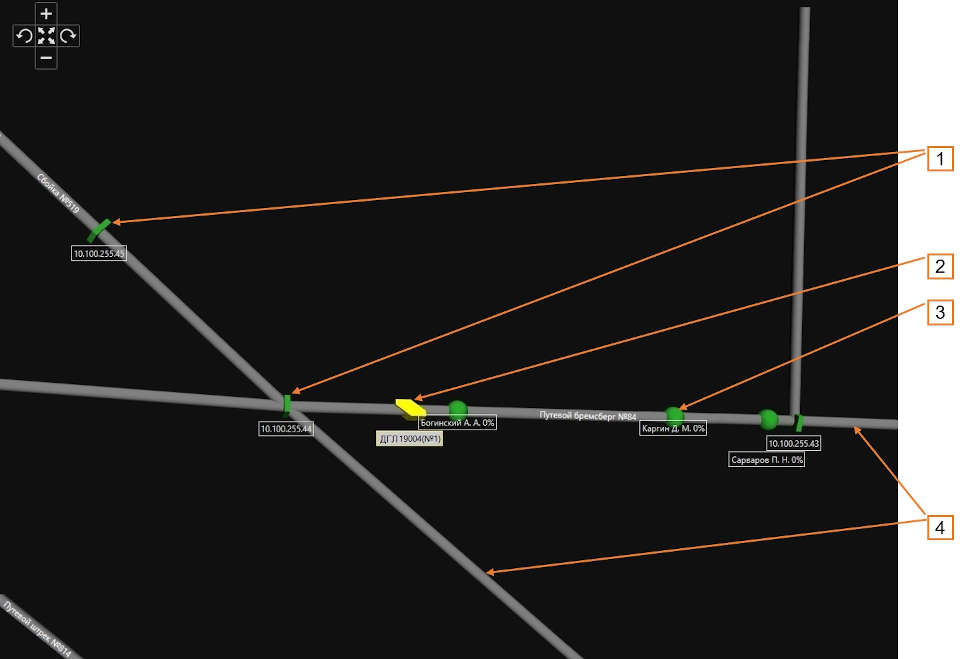
Все передаваемые на верхний уровень данные обрабатываются сервером системы «SBGPS» и в удобной для восприятия форме отображаются на АРМ оператора системы (горного диспетчера). Местоположение ДГЛ показывается в графическом виде на трехмерной модели шахты (рис. 3).
Рис. 3 Местоположение ДГЛ с контроллером GAL на трехмерной модели шахты в системе «SBGPS»: 1 – базовая станция подземной инфраструктуры связи; 2 – ДГЛ с контроллером GAL; 3 – местоположение персонала; 4 – горные выработки Fig. 3 Location of the dieselhydraulic locomotive with the GAL controller in a 3D mine model in the SBGPS system: 1 – underground communication base station; 2 – diesel-hydraulic locomotive with GAL controller; 3 – personnel location; 4 – mine workings
Также все данные, получаемые от ДГЛ, могут выводиться на устройства переговорные (смартфоны) системы «SBGPS» [2], наблюдение за которыми в режиме реального времени может вести машинист локомотива.
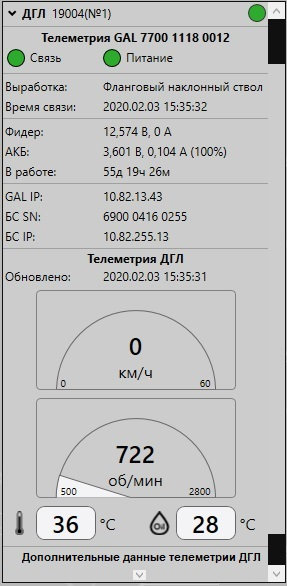
Рис. 4 Информационная панель на АРМ горного диспетчера с параметрами работы ДГЛ (основная часть) системы «SBGPS» Fig. 4 Information dashboard on the mine dispatcher computer with dieselhydraulic locomotive parameters (main part) in the SBGPS system
Параметры работы ДГЛ представляются в составе (рис. 4):
модель машины, заводской номер ДГЛ;
время связи (текущие: год, месяц, день, час, минута, секунда);
телеметрические данные (скорость, обороты двигателя, температура двигателя, температура гидравлической жидкости, расход топлива, уровень охлаждающей жидкости в расширительном баке, уровень воды в баке выхлопных газов, давление всасываемого воздуха, уровень топлива, температура топлива, моточасы).
На верхнем уровне формируются и отображаются в непрерывном режиме оперативные данные работы ТС, позволяющие своевременного реагировать на исправление ситуации при отклонении параметров от регламентного режима эксплуатации, например, путем передачи информации машинисту по мобильной связи. В числе прочего автоматически могут быть поданы команды по снижению скорости движения, ограничению оборотов двигателя, для предотвращения вероятного столкновения. Контроль за работой ДГЛ с выдачей рекомендаций по упорядочению режима эксплуатации позволяет при выходе его из строя выполнить анализ полученных данных, предшествующих остановке локомотива, и сделать конкретный вывод о причинах, приведших к его поломке.
Эффективность передачи данных, принятых контроллером GAL с ТС, на верхний уровень бесспорна. Но не в меньшей мере полученная информация полезна для водителя ТС и ремонтников, которые используют накопленные в контроллере данные непосредственно на месте, связавшись с ним по радиоканалу (планшет, смартфон), – для поиска неисправностей и др.
В целом применение контроллеров GAL в комплекте с ТС на шахтах расширяет функциональность и практическую отдачу системы «SBGPS» – помимо решения задач по обеспечению безопасности решаются задачи технологические. В перспективе может быть организовано, помимо контроля, дистанционное управление ТС на всем протяжении горных выработок, оснащенных инфраструктурой системы «SBGPS», обеспечивающей определение местоположения движущихся объектов на трехмерной модели шахты с разрешением на уровне (3 ± 1) м, что делает ее перед системами с дискретным способом приема-передачи информации более предпочтительной.
Рассмотренная в настоящей работе технология позиционирования и мониторинга транспортных средств в угольных шахтах целесообразна к распространению в рудных шахтах с применением контроллеров GAL, устанавливаемых на ТС, как показано, например, на рис. 5.
Рис. 5 Контроллер GAL на ТС в руднике: 1 – кабина ТС; 2 – контроллер GAL Fig. 5 GAL controller mounted on a vehicle in the mine: 1 – Vehicle cabin; 2 – GAL controller
Заключительныеположения
1. Получен положительный опыт применения системы позиционирования «SBGPS» в угольной шахте для беспроводной передачи на пульт горного диспетчера данных о местоположении и параметрах работы дизель-гидравлических локомотивов, укомплектованных специальным контроллером GAL, совместимым с подземной инфраструктурой связи системы.
2. Передача на верхний уровень данных работы ТС с применением инфраструктуры связи системы «SBGPS» выполняется в режиме реального времени, что, в отличие от дискретного метода с зональным позиционированием и считывателями, обеспечивает оперативное получение результатов эксплуатации ТС и может быть рекомендовано как прогрессивное направление по данной тематике.
3. Технология передачи на верхний уровень данных работы ТС, освоенная для угольной шахты, может быть успешно применена в рудниках при условии оснащения горных выработок подземной инфраструктурой связи (информационной сетью) системы «SBGPS», либо аналогичных, и укомплектования ТС специальными устройствами считывания параметров работы и передачи с координатами местоположения на верхний уровень.
Списоклитературы
1. Новиков А.В., Паневников К.В., Писарев И.В. Многофункциональная система безопасности угольных шахт – практика применения систем определения местоположения и оповещения персонала. Горная промышленность. 2018;(2):93–98. DOI: 10.30686/16099192-2018-2-138-93-98
2. Новиков А.В., Паневников К.В., Писарев И.В. Рудник и многофункциональная система безопасности. Горная промышленность. 2019;(5):4–9. DOI: 10.30686/1609-9192-2019-5-04-09. References
Перечень ВАК РФ (2024-2026 гг.) Журнал «Горная промышленность» – Категория 1