


Реализация сервисов обеспечения безопасности на базе данных о местоположении
- М.В. Костенко, О.А. Галенчикова
ООО Научно-производственная фирма «Гранч», г. Новосибирск, Российская Федерация
Горная Промышленность №6 / 2020 стр. 100-104
![]() Резюме: В работе рассматривается возможность реализации системы предотвращения проезда на конвейере на базе данных системы определения локального местоположения с использованием метода определения расстояния по времени пролета СШП сигнала. Испытания проводились на базе Системы «SBGPS» производства ООО НПФ «Гранч» (г. Новосибирск), развернутой на угольной шахте, для чего был выбран участок с ленточным конвейером и одной из базовых станций, поддерживающей испытываемый метод позиционирования. Результаты показывают, что точность системы позволяет легко различать перемещения контролируемых объектов пешком и на ленте конвейера, при этом время реакции системы составляет около 5–7 с при условии стабильной беспроводной связи, для обеспечения которой требуется учитывать область перемещения контролируемых устройств и возможные препятствия при размещении базовых станций, т.е. к участкам с применением данной функции при развертывании инфраструктуры предъявляются дополнительные требования.
Резюме: В работе рассматривается возможность реализации системы предотвращения проезда на конвейере на базе данных системы определения локального местоположения с использованием метода определения расстояния по времени пролета СШП сигнала. Испытания проводились на базе Системы «SBGPS» производства ООО НПФ «Гранч» (г. Новосибирск), развернутой на угольной шахте, для чего был выбран участок с ленточным конвейером и одной из базовых станций, поддерживающей испытываемый метод позиционирования. Результаты показывают, что точность системы позволяет легко различать перемещения контролируемых объектов пешком и на ленте конвейера, при этом время реакции системы составляет около 5–7 с при условии стабильной беспроводной связи, для обеспечения которой требуется учитывать область перемещения контролируемых устройств и возможные препятствия при размещении базовых станций, т.е. к участкам с применением данной функции при развертывании инфраструктуры предъявляются дополнительные требования.
Ключевые слова: позиционирование, определение местоположения, СШП, UWB, RTLS, безопасность
Для цитирования: Костенко М.В., Галенчикова О.А. Реализация сервисов обеспечения безопасности на базе данных о местоположении. Горная промышленность. 2020;(6):100-104. DOI: 10.30686/1609-9192-2020-6-100-104.
Информация о статье
Поступила в редакцию: 09.12.2020
Поступила после рецензирования: 14.12.2020
Принята к публикации: 16.12.2020
Информация об авторе
Mikhail V. Kostenko – Lead Electronics Engineer, LLC Scientific and Production Firm «Granch», Novosibirsk, Russian Federation, e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Oxana A. Galenchikova – Deputy Chief of Research and Technology Department, LLC Scientific and Production Firm «Granch», Novosibirsk, Russian Federation, e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Введение
В мире продолжается развитие тематики позиционирования внутри помещений. Некоторые авторы стремятся обобщить актуальные данные по системам позиционирования реального времени (RTLS) и предоставить читателю общий взгляд на доступные решения и технологии, их преимущества и недостатки [1]. Другие рассматривают конкретные физические принципы, подходящие для них алгоритмы обработки данных [2–5]. Также представлены и гибридные системы, использующие несколько различных принципов определения местоположения для компенсации недостатков друг друга [6]. Ряд работ посвящен решению конкретных задач, для которых требуются данные о местоположении [7].
Одной из таких задач является повышение безопасности труда, которой особое внимание уделяется на опасных производствах, в частности, в угольных шахтах. Например, чтобы упростить задачу поиска людей, достаточно знать их местоположение. Получая данные о местоположении объекта и обрабатывая их с помощью определенных алгоритмов, можно предотвращать столкновения внутришахтного транспорта, наезды на персонал или несанкционированные проезды на конвейере. Для такой обработки, как правило, требуется дополнительная информация, такая как:
– место проведения измерений (например, для выяснения наличия опасных объектов и допустимости нахождения контролируемого объекта в определенной зоне);
– окружающая инфраструктура (для уточнения расчета конечного местоположения, а также определения взаимосвязи контролируемых объектов для задач предотвращения столкновений и аналогичных);
– история измерений для контроля динамики перемещения объекта.
Часть подобной информации может эффективно контролироваться только сервером системы. В то же время связь с сервером может быть уязвимым местом и значительно уменьшать надежность системы, в то время как надежность является одним из ключевых параметров для задач обеспечения безопасности. Распределение накопления данных и проведения вычислений в системе могут позволить построить надежную сенсорную сеть, отдельные части которой будут способны поддерживать функции обеспечения безопасности как при наличии связи с сервером, так и автономно. В качестве примера такого сервиса можно рассмотреть определение проезда на конвейере по данным местоположения объекта.
Одним из характерных для конвейера параметров является скорость движения ленты. Наблюдение за изменением данных о местоположении даст возможность оценить и скорость перемещения контролируемого объекта.
При этом, в данной задаче нет необходимости в хранении большого массива данных, так как определение проезда должно происходить как можно быстрее. Информация о нахождении поблизости конвейера (контекст, который делает потенциально возможным проезд на конвейере) может быть получена контролируемым объектом как от сервера, так и от находящихся вблизи элементов инфраструктуры Системы многофункциональной связи, наблюдения, оповещения и поиска людей, застигнутых аварией «SBGPS» (далее – Система «SBGPS»). В случае выявления движения, характерного для перемещения на конвейере, могут приниматься различные меры – от информирования персонала с фиксацией нарушения до автоматической остановки конвейера в целях предотвращения несчастных случаев.
В данной статье представлены результаты испытаний позиционирования по времени пролета сверхширокополосного сигнала (СШП) с использованием функционала Системы «SBGPS» производства ООО НПФ «Гранч» (г. Новосибирск) для обеспечения определения проезда на конвейере. Ранее уже проводились испытания данной системы с целью оценки точности определения местоположения, позволяющие предположить высокую эффективность решения данной задачи.
Описание прототипа
Испытания методики определения проезда на ленточном конвейере по скорости перемещения проводились в горных выработках угольной шахты на участке с наличием подземной инфраструктуры Системы «SBGPS» на основе базовых станций SBGPS Master-06 (далее БС), подготовленных к использованию СШП позиционирования. В качестве контролируемых объектов выступали штатные устройства оповещения SBGPS Light-4 (далее УО), также поддерживающие точное позиционирование по СШП каналу.

- Рис. 1 Начало контролируемого участка: приводной барабан ленточного конвейера и начало водяного заслона
- Fig. 1 Beginning of the monitored area: the belt conveyor drive pulley and the beginning of the water barrier
В данной системе определение координат местоположения объектов контроля осуществляется с разрешением ±2 м. Для испытания штатные УО были снабжены специальной версией программного обеспечения, в которой проводился анализ данных о расстоянии до обнаруженных БС в течение последних 10 секунд. Измерение расстояния до обнаруженных БС инициируется 1 раз в секунду. Более подробно работа СШП в системе рассмотрена в [8; 9]. Контролировались результаты измерения расстояния между УО и БС средствами СШП позиционирования на участке в 80 м, в центре которого находилась БС. Также на данном участке расположен ленточный конвейер, скорость движения ленты которого составляла 3,15 м/с. Начало участка установлено перед приводным барабаном ленточного конвейера (рис. 1). На участке присутствуют различные элементы, затрудняющие связь между УО и БС, из которых наиболее сильно ограничивает прямую видимость водяной заслон (рис. 1 и 2).
- Рис. 2 Окончание водяного заслона, место крепления БС в центре контролируемого участка
- Fig. 2 The end of the water barrier, the mounting position of the base station in the center of the monitored area
В случае обнаружения стабильного превышения уставки по скорости перемещения УО передавало информацию на сервер, а также обозначало регистрацию превышения звуковыми и световыми сигналами для информирования испытателя в шахте. Уставка по скорости для испытаний была выбрана в 2,8 м/с (около 10 км/ч).
Результаты испытаний
Испытания проводились с целью проверки наличия ложных срабатываний, возможности и достоверности определения факта проезда на конвейере по данным о местоположении и среднее время реакции системы.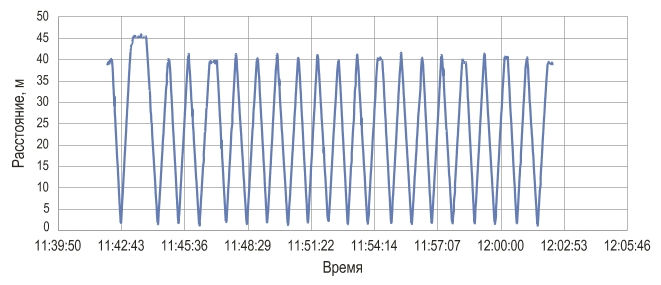
- Рис. 3 Данные по расстоянию между УО и БС при перемещении испытателя между началом и концом контролируемого участка в 80 м с БС в центре
- Fig. 3 Data on the distance between the warning device and the base station when the tester moves from the beginning to the end of the 80-meter-long controlled area with the base station in the center
В первой части испытаний определялось наличие ложных срабатываний системы определения проезда на конвейере при перемещении пешком. Производились испытания как с одиночными УО, так и с группой до 10 шт. В ходе испытаний ложных определений проезда на конвейере не обнаружено. На рис. 3 представлен график, демонстрирующий изменение расстояния одного из УО от БС во время пешего перемещения по участку. 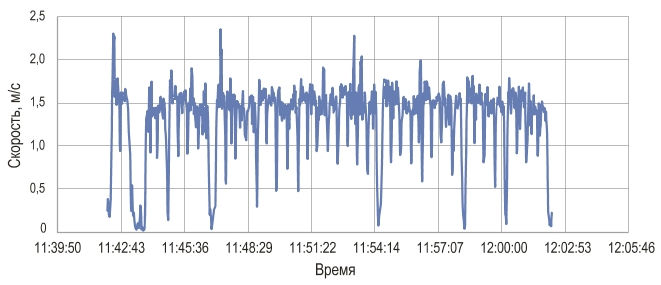
- Рис. 4 Усредненное значение скорости перемещения УО по 3 с
- Fig. 4 Averaged travel speed of the warning device for the period of 3 sec.
Средняя скорость ходьбы при этом составляла 5–7 км/ч (около 1,4–1,9 м/с), которая определялась по времени прохождения участка. Полученные из данных о расстоянии значения скорости с усреднением за 3 и 5 с представлены на рис. 4 и 5, соответственно. Необходимо отметить, что для времени нахождения на контролируемом участке 3,5% попыток измерения расстояния по СШП оказались неудачными, и в таком случае, для усреднения по аналогичному количеству измерений потребуется больше времени. Было затруднено измерение расстояния на границах контролируемого участка при удалении УО от БС на расстояние около 40 м из-за ограничения прямой видимости между устройствами.
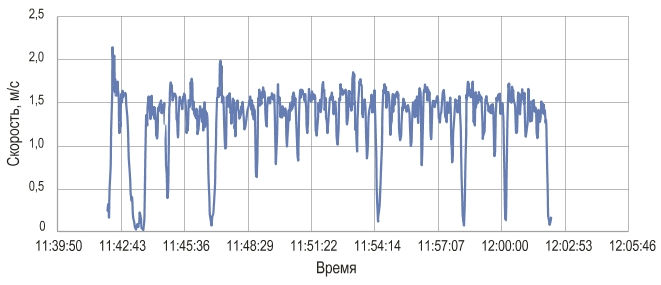
- Рис. 5 Усредненное значение скорости перемещения УО по 5 с
- Fig. 5 Averaged travel speed of the warning device for the period of 5 sec.
Во второй части испытаний определяются надежность выявления проезда на конвейере по динамике изменений данных о местоположении, а также время реакции системы. Проверялась реакция системы при проезде одного УО. В зоне покрытия БС находилось также трое УО испытателей. Первый испытатель располагался в начале контролируемого участка (далее – КТ 1), представленного на рис. 1.
Испытатель размещал УО на движущейся ленте конвейера и запускал секундомер для определения времени срабатывания сигнала о превышении допустимой скорости на УО. Второй испытатель располагался в 27 м от КТ 1. Место расположения второго испытателя определено, исходя из скорости движения конвейера (3,15 м/с) и предполагаемого времени срабатывания сигнала. Второй испытатель снимал УО с конвейера и передавал на стартовую позицию. По результатам 30 проездов вероятность определения превышения уставки по скорости составила 97%. Испытателями в шахте фиксировалось время от расположения УО на ленту конвейера до регистрации сигналов от УО. Определение происходило в диапазоне времени 5–9 с со средним значением в 6,75 с, связь с сервером при этом отсутствовала по условиям эксперимента.
Далее проводились аналогичные испытания при наличии связи с сервером, а также варьировалось количество участвующих в испытании УО – на конвейере от одного до шести УО одновременно и до двенадцати неподвижных УО в зоне покрытия БС.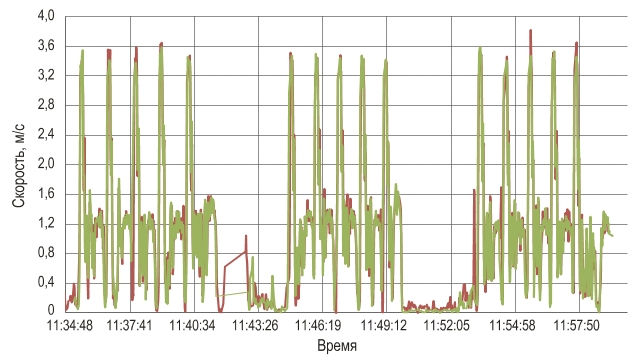
- Рис. 6 15 перемещений на конвейере двух УО одновременно
- Fig. 6 15 travels on the conveyor belt of two warning devices simultaneously
На рис. 6 продемонстрированы данные испытания, в котором два УО многократно располагались на ленте конвейера. Можно выделить три уровня значений скорости перемещения, соответствующих действительному перемещению УО. 15 интервалов со значениями от 3 до 3,5 м/с соответствуют проезду на конвейере. После них следуют интервалы со значениями от 1 до 1,5 м/с, соответствующие перемещению одного из испытателей с УО к стартовой позиции. Также присутствуют два интервала со значениями менее 1 м/с, соответствующими паузами в испытании.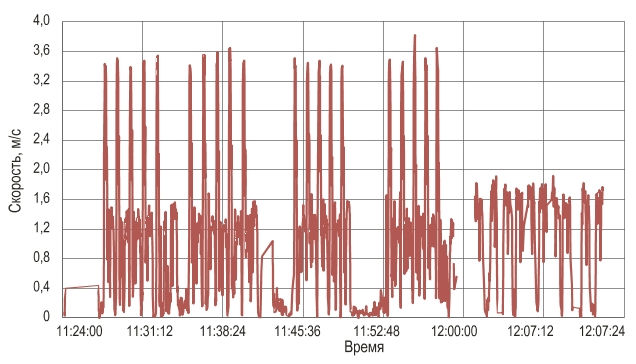
- Рис. 7 20 перемещений УО на конвейере до 12:00 и 10 прохождений контролируемого участка пешком после 12:00
- Fig. 7 20 travels of the warning device on the conveyor belt before 12.00 am and 10 on-foot travels in the controlled area after 12.00 am
Полученные в ходе испытаний данные позволяют сделать вывод о том, что по рассчитанным значениям скорости можно с высокой достоверностью определять характер перемещения контролируемого объекта. Можно ожидать, что перемещения, отличающиеся на 0,5 м/с, будут безошибочно определяться в случае стабильного получения данных. В некоторых задачах, таких как предотвращение столкновений, рассчитанная скорость может использоваться совместно с данными о расстояниях между элементами системы и местоположением на контролируемом объекте для усложнения логики работы и реализации множества сценариев поведения.
Проведённый эксперимент показал, что стабильность измерения расстояния между УО и БС зависит от прямой видимости между ними, которая может быть ограничена, например, из-за наличия заграждающих элементов конвейера (при размещении УО на конвейере) или водяного заслона. Ограничение прямой видимости может приводить к увеличению времени регистрации факта проезда на конвейере и к затруднению его идентификации. Так же на определение факта проезда на конвейере влияет расположение БС относительно ленты конвейера в совокупности с наличием в зоне видимости УО только одной БС с СШП позиционированием. Имеющееся расположение БС на испытуемом участке приводит к тому, что скорость, рассчитанная в течение 3–4 с, при наименьшем расстоянии между УО и БС, оказывалась меньше выбранной уставки (2,8 м/с). Данные недостатки могут быть устранены изменением расположения элементов инфраструктуры Системы «SBGPS» с учетом задачи определения проезда на конвейере. В испытании использовался участок, изначально не предусматривающий испытываемой функции, соответственно монтаж БС проводился без учета ряда требований.
Заключение
Проведенные испытания показывают, что точности определения местоположения с использованием СШП сигналов достаточно для уверенного выявления событий проезда на конвейере из пешего перемещения по контролируемому участку. Метод в совокупности с Системой «SBGPS» позволяет создать зону с непрерывным контролем скорости перемещения, без контрольных точек и пропускных рамок, с организацией передачи данных по СШП каналу между элементами системы и выполняющую функции как автономно, так и взаимодействуя с сервером.
Преимуществом Системы «SBGPS» является возможность расширения ее функционала путем изменения лишь программного обеспечения ее элементов без аппаратных доработок. Испытания подтверждают перспективность применения СШП позиционирования для реализации дополнительных функций систем обеспечения безопасности на основе данных о точном местоположении контролируемого объекта. Данный функционал можно применить для решения таких актуальных задач, как контроль скорости, опасных зон, предотвращения столкновений и проезд персонала шахт на конвейере.
Список литературы
1. Zafari F., Gkelias A., Leung K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Communications Surveys & Tutorials. 2019;21(3):2568–2599. DOI: 10.1109/COMST.2019.2911558.
2. Courtay A., Gentil M.L., Berder O., Scalart P., Fontaine S., Carer A. Anchor Selection Algorithm for Mobile Indoor Positioning using WSN with UWB Radio. In: 2019 IEEE Sensors Applications Symposium (SAS) 11–13 March 2019, Sophia Antipolis, France. DOI: 10.1109/SAS.2019.8706113.
3. Poulose A., Eyobu O.S., Kim M., Dong Seog Han. Localization Error Analysis of Indoor Positioning System Based on UWB Measurements. In: 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), 2–5 July 2019, Zagreb, Croatia. DOI: 10.1109/ICUFN.2019.8806041.
4. Molnár M., Luspay T. Development of an UWB based Indoor Positioning System. In: 2020 28th Mediterranean Conference on Control and Automation (MED), 15–18 Sept. 2020, Saint-Raphaël, France. DOI: 10.1109/MED48518.2020.9183329.
5. Wang N., Yuan X., Ma L., X. Tian Research on Indoor Positioning Technology Based on UWB. In: 2020 Chinese Control and Decision Conference (CCDC), 22–24 Aug. 2020, Hefei, China. DOI: 10.1109/CCDC49329.2020.9164327.
6. Ding G., Lu H., Bai J., Qin X. Development of a High Precision UWB/Vision-based AGV and Control System. In: 2020 5th International Conference on Control and Robotics Engineering (ICCRE), 24–26 April 2020, Osaka, Japan. DOI: 10.1109/ICCRE49379.2020.9096456.
7. Tian D., Xiang Q. Research on Indoor Positioning System Based on UWB Technology. In: 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), 12–14 June 2020, Chongqing, China. DOI: 10.1109/ITOEC49072.2020.9141707.
8. Насибуллина Т.В., Костенко М.В. Анализ и математическое моделирование системы определения местоположения персонала угольной шахты, построенной с применением сенсорной сети. Часть 1. Оценка влияния внешних факторов на точность определения местоположения в реальной системе. Горная промышленность. 2019;(4):126–132. DOI: 10.30686/1609-9192-2019-4-126-132.
9. Костенко М.В., Гридчин В.А. Применение систем ToF UWB позиционирования в туннелях горных выработок. В: Гадюкина А.В. (ред.) Наука. Технологии. Инновации: материалы конференции, Новосибирск, 3–7 декабря 2018 г. Новосибирск: Новосибирский государственный технический университет; 2018. Ч. 6. С. 24–27.










