


Концепция создания беспилотного самоходного аппарата для работы в угольных шахтах. Часть 2
![]() А.М. Липанов1, В.Б. Артемьев2, С.А. Петрушин3, В.Н. Костеренко4, А.В. Мутыгуллин4, С.И. Концевой4, М.А. Лифер5, А.С. Концевой6, М.Л. Ким4
А.М. Липанов1, В.Б. Артемьев2, С.А. Петрушин3, В.Н. Костеренко4, А.В. Мутыгуллин4, С.И. Концевой4, М.А. Лифер5, А.С. Концевой6, М.Л. Ким4
1 Удмуртский федеральный исследовательский центр Уральского отделения РАН, г. Ижевск, Российская Федерация
2 АО «МХК «ЕвроХим», г. Москва, Российская Федерация
3 ООО «Республиканский центр робототехники», г. Ижевск, Российская Федерация
4 АО «СУЭК», г. Москва, Российская Федерация
5 АО «Черногорский ремонтно-механический завод», г. Черногорск, Республика Хакасия, Российская Федерация
6 ООО «Системы контроля и планирования», г. Москва, Российская Федерация
Горная Промышленность №6 / 2022 стр. 36-44
Резюме: Статья является продолжением исследования, описанного в журнале «Горная промышленность» № 5 (https://doi.org/10.30686/1609-9192-2022-5-00-00). В работе представлен модуль «Следопыт» беспилотного самоходного аппарата, который был разработан в рамках проекта «Хамелеон». При объединении этого модуля с базовым модулем «Мул» он позволяет создать беспилотный самоходный аппарат-разведчик. Модуль «Следопыт» предназначен для проведения мониторинга местности. Данный модуль оснащён системами создания математической модели окружающей среды, которые обеспечивают его движение при отсутствии коммуникации с оператором. Модуль оснащён комплексом фиксации и записи видеоинформации длительностью не менее чем 4 ч, бинокулярным телескопом с не менее чем 18-кратным зумом, прибором ночного видения, тепловизором с углом разрешения не более 3° (с дальностью обнаружения тепловой цели не менее чем за 1000 м) и направленными акустическими микрофонами. В статье описаны сценарии использования модуля «Следопыт»: мониторинговая операция, поисковая операция, спасательная операция, операция по ликвидации пожара в шахте. Авторы считают, что необходимо как можно быстрее начать серийный выпуск проекта «Хамелеон» в рамках программы замещения импортного оборудования с перспективой экспорта не только в страны с развивающейся экономикой, но и в страны с высоким уровнем технологий.
Ключевые слова: беспилотный самоходный аппарат, система фиксации, система сопровождения цели, анализ видеоинформации, разведка, авария в шахте
Для цитирования: Для цитирования Липанов А.М., Артемьев В.Б., Петрушин С.А., Костеренко В.Н., Мутыгуллин А.В., Концевой С.И., Лифер М.А., Концевой А.С., Ким М.Л. Концепция создания беспилотного самоходного аппарата для работы в угольных шахтах. Часть 2. Горная промышленность. 2022;(6):36–44. https://doi.org/10.30686/1609-9192-2022-6-36-44
Информация о статье
Поступила в редакцию: 03.09.2022
Поступила после рецензирования: 02.11.2022
Принята к публикации: 07.11.2022
Информация об авторах
Липанов Алексей Матвеевич – академик РАН, доктор технических наук, Президиум Уральского отделения РАН, Отделение энергетики, машиностроения механики и процессов управления, Секция механики; Удмуртский федеральный исследовательский центр Уральского отделения РАН, г. Ижевск, Российская Федерация.
Артемьев Владимир Борисович – доктор технических наук, советник генерального директора, АО «МХК «ЕвроХим», г. Москва, Российская Федерация.
Петрушин Сергей Александрович – кандидат технических наук, доцент, заместитель директора по науке, ООО «Республиканский центр робототехники», г. Ижевск, Российская Федерация.
Костеренко Виктор Николаевич – кандидат технических наук, начальник управления противоаварийной устойчивости, ГО и ЧС, АО «СУЭК», г. Москва, Российская Федерация.
Мутыгуллин Альберт Вакильевич – начальник управления, главный механик, инженер механик АО «СУЭК», г. Москва, Российская Федерация.
Концевой Семен Израилович – старший механик по горно-шахтному оборудованию, инженер механик, АО «СУЭК», г. Москва, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Лифер Максим Анатольевич – инженер механик, директор, АО «Черногорский ремонтно-механический завод», г. Черногорск, Республика Хакасия, Российская Федерация.
Концевой Александр Семенович – инженер-экономист, ООО «Системы контроля и планирования», г. Москва, Российская Федерация.
Ким Максим Ленсович – кандидат технических наук, главный эксперт управления по подземным горным работам и инжинирингу, АО «СУЭК, г. Москва, Российская Федерация.
Введение
Первоочередной задачей применения БСАК в шахтах является применение в технологических процессах, в опасных зонах и производственных и аварийных ситуациях, в том числе при мониторинге состояния обстановки в шахте.
Для проведения мониторинга состояния обстановки в шахте: измерения уровня СО, СО2 СH4, О2 и других газов, измерения температуры, получения видеоизображения состояния объектов шахты и т. п., нами в рамках проекта «Хамелеон» был разработан модуль «Следопыт» (рис. 1). Его объединение с модулем «Мул» позволяет создать БСАК-разведчик.
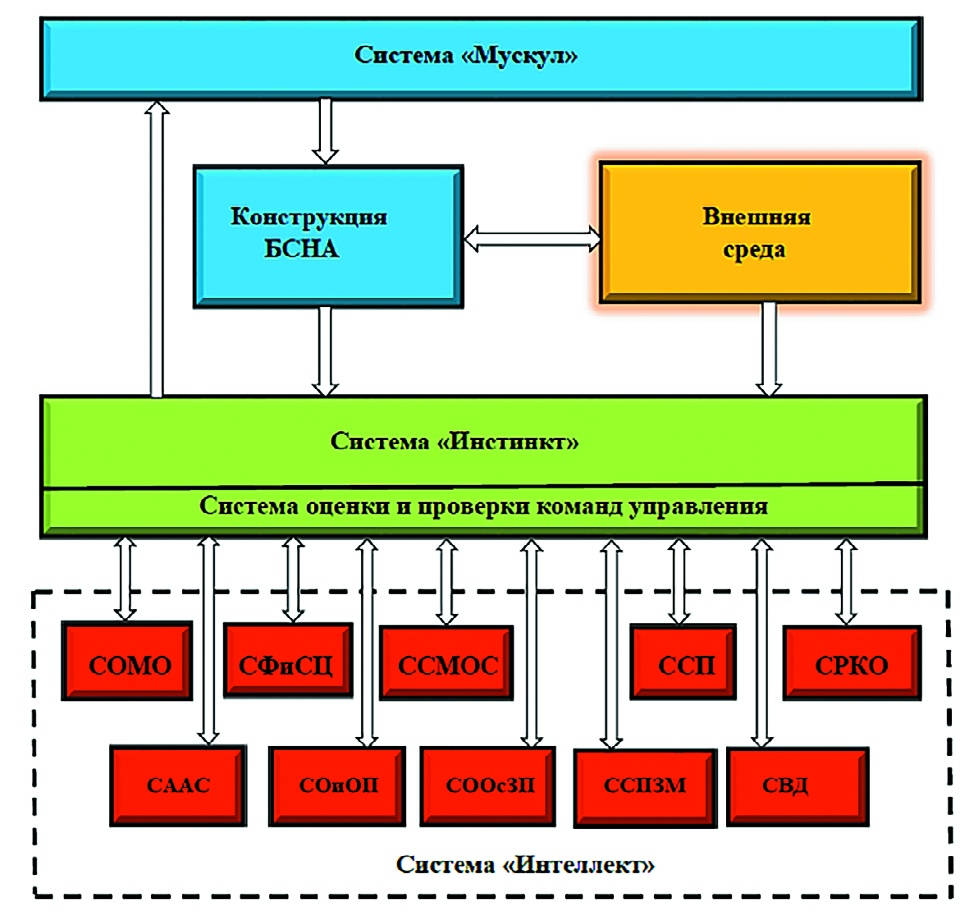 Рис. 1 Структура САУ модуля «Следопыт»: СОМО – система определения местоположения объекта; СФиСЦ – система фиксации и сопровождения цели (анализа видеоинформации); ССМОС – система создания модели окружающей среды; ССП – система счисления пути; СРКО – система распознавания команд оператора и их выполнения; СААС – система анализа акустических сигналов; СОиОП – система обнаружения и объезда препятствий, мешающих движению БСНА по заданному маршруту; СООсЗП – система обнаружения объекта с заявленными признаками; ССПЗМ – система «следуй по заданному маршруту»; СВД – система «возвращайся домой»
Рис. 1 Структура САУ модуля «Следопыт»: СОМО – система определения местоположения объекта; СФиСЦ – система фиксации и сопровождения цели (анализа видеоинформации); ССМОС – система создания модели окружающей среды; ССП – система счисления пути; СРКО – система распознавания команд оператора и их выполнения; СААС – система анализа акустических сигналов; СОиОП – система обнаружения и объезда препятствий, мешающих движению БСНА по заданному маршруту; СООсЗП – система обнаружения объекта с заявленными признаками; ССПЗМ – система «следуй по заданному маршруту»; СВД – система «возвращайся домой»
Fig. 1 Composition of the Pathfinder Module’s automatic control system: СОМО – object location system; СФиСЦ – target locking and tracking system (video information analysis); ССМОС – natural environment modelling system; ССП – dead reckoning system; СРКО – system of operator's commands recognition and execution; СААС – acoustic signal analysis system; СОиОП – a system for detection and avoidance of obstacles that prevent the unmanned self-propelled ground vehicle from moving along the specified route; СООсЗП – a system for detecting objects with specified characteristics; ССПЗМ – the Follow-the- Specified-Route system; СВД – the Return-to-Home-Position system
Модуль «Следопыт» предназначен для проведения мониторинга местности и её разведки. Его назначение – обеспечение каналом связи созданного на его базе БСАК с потребителем регистрируемой информации, установки коммуникации с оператором и самостоятельного функционирования и выполнения поставленных ему задач (в отсутствие связи с оператором).
Данный модуль оснащён всеми возможными на сегодня системами создания математической модели окружающей среды, которые обеспечивают его движение при отсутствии коммуникации с оператором. Это самый насыщенный электронными системами модуль. Данный модуль самый дорогой и самый передовой с точки зрения используемых в нём алгоритмов управления.
В обязательном порядке модуль оснащён комплексом фиксации и записи (сжатия и кодирования) видеоинформации длительностью не менее чем 4 ч, бинокулярным телескопом с не менее чем 18-кратным зумом, прибором ночного видения, тепловизором с углом разрешения не более 3° (с дальностью обнаружения тепловой цели не менее чем за 1000 м) и направленными акустическими микрофонами.
Итак, возможны следующие сценарии его использования:
1. Мониторинговая операция.
2. Поисковая операция.
3. Спасательная операция.
4. Операция по ликвидации пожара в шахте.
Мониторинговая операция
Авария на шахте. К месту аварии движется БСАК «Следопыт» из четырёх модулей (рис. 2) (платформами «Метеоролог», «Родник» и «Улей»), снимая окружающую обстановку на камеру и передавая изображение спасателям. Модуль «Метеоролог» (рис. 3) измеряет и передаёт спасателям газовую обстановку в атмосфере горных выработок (пробу воздуха). Спасатели находятся на безопасном расстоянии от места аварии. Малоразмерный БСКА «Следопыт» подходит к эпицентру аварии, дальше которого он пройти не может, что определяет оператор.
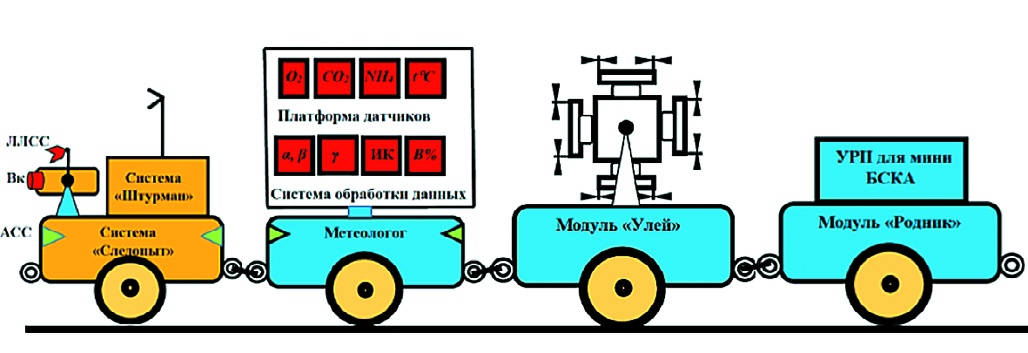 Рис. 2 Многомодульный малоразмерный БСАК из четырёх модулей
Рис. 2 Многомодульный малоразмерный БСАК из четырёх модулей
Fig. 2 A multi-module small-size unmanned self-propelled wheeled vehicle made up of four modules
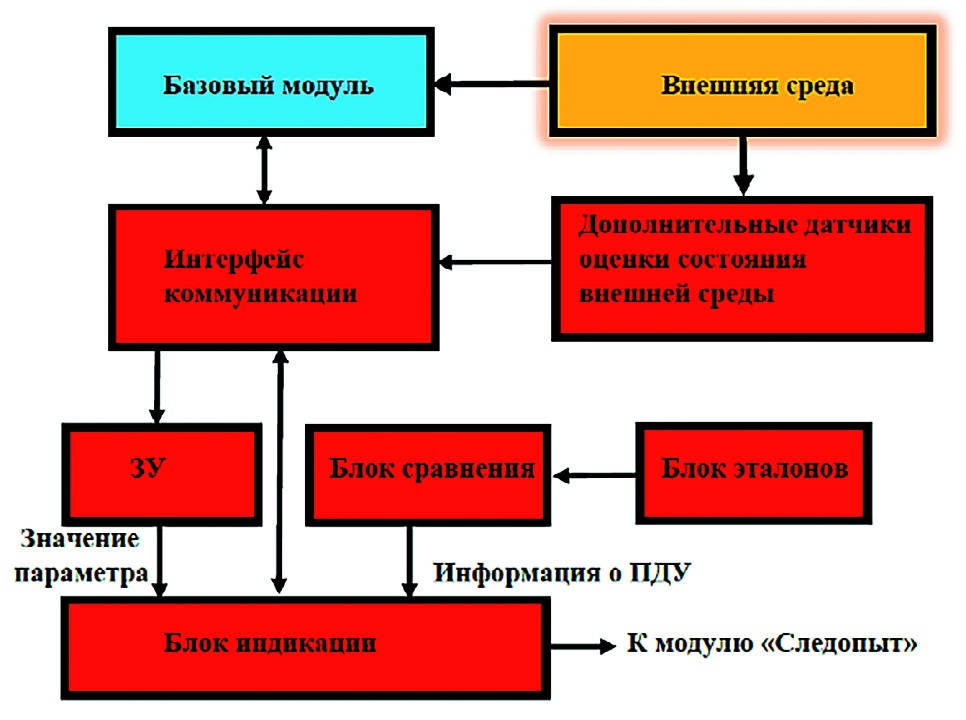 Рис. 3 Структура САУ модуля «Метеоролог»
Рис. 3 Структура САУ модуля «Метеоролог»
Fig. 3 Composition of the Meteorologist Module’s automatic control system
В этом случае оператор даёт команду на запуск с модулей «Улей» (рис. 4) и «Родник» (рис. 5) минибеспилотных авиационных систем (БАС) или миниБСАК, проектов «Мышь» (рис. 6) или «Удав» (рис. 5), которые, преодолев завал, продолжают поисковую операцию, также снимая окружающую обстановку и фиксируя содержание газов и температуру. Время работы миниБАС или миниБСАК лежит в пределах 25–35 мин, а время работы малоразмерного БСАК исчисляется тремя-четырьмя часами в зависимости от рельефа поверхности шахты, именно поэтому последний используется как средство их доставки в эпицентр аварии.
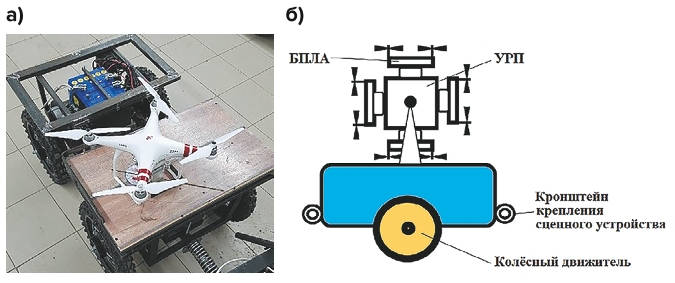 Рис. 4 Модуль БСКА с УРП для БАС: а – макетный вариант УРП для одного БАС; б – мнемосхема варианта УРП для четырёх БАС
Рис. 4 Модуль БСКА с УРП для БАС: а – макетный вариант УРП для одного БАС; б – мнемосхема варианта УРП для четырёх БАС
Fig. 4 Unmanned self-propelled wheeled vehicle module with URP for unmanned aircraft systems: а – a mock-up version of URP for one unmanned aircraft system; б – mnemonic diagram of the URP version for four unmanned aircraft systems
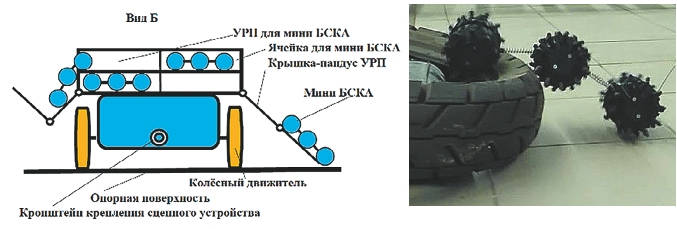 Рис. 5 Мнемосхема модуля БСКА с УРП для миниБСАК проекта «Удав»
Рис. 5 Мнемосхема модуля БСКА с УРП для миниБСАК проекта «Удав»
Fig. 5 A mnemonic diagram of the unmanned self-propelled wheeled vehicle module with URP for the mini-unmanned self-propelled wheeled vehicles of the Boa Project
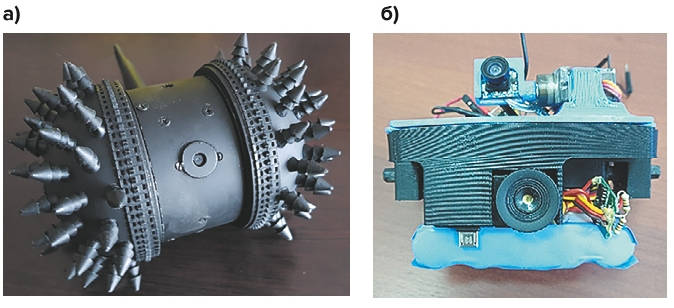 Рис. 6 МиниБСАК проекта «Мышь»: а – общий вид; б – конструкция
Рис. 6 МиниБСАК проекта «Мышь»: а – общий вид; б – конструкция
Fig. 6 A mini-unmanned self-propelled wheeled vehicles of the Mouse Project: а – general view; б – assembly
Поисковая операция
Авария на шахте. К месту аварии направляются горноспасательные отделения, за которыми на небольшом удалении движется БСАК «Следопыт» (см. рис. 2), управляемый САУ «следуй за мной» (ССзМ, рис. 7) с тремя модулями (платформами «Мул», «Родник» и «Улей»). Они подходят, например, к завалу или к зоне высоких температур, дальше которого человек идти не может. Горноспасатели расчищают, насколько это возможно, завал и пускают в него БСАК «Следопыт», который продолжает своё движение в автоматическом режиме к эпицентру аварии, снимая окружающую обстановку на камеру и передавая изображение спасателям. Спасатели наблюдают за обстановкой и управляют его движением. На БСАК установлен инфракрасный датчик, позволяющий обнаружить живого пострадавшего человека в полной темноте, хотя имеется также и прожектор, установленный на дистанционно управляемую турель (ДУТ).
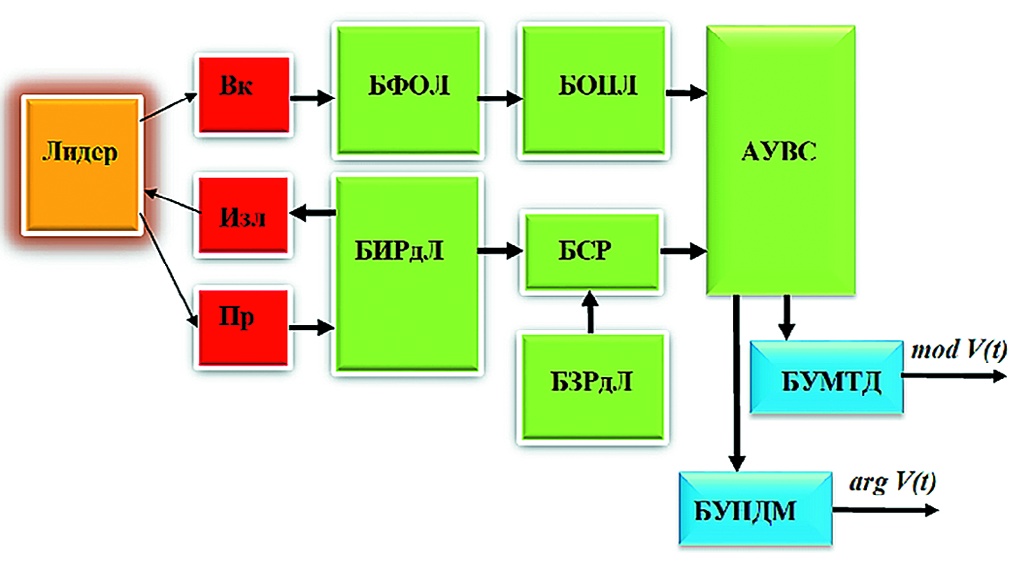 Рис. 7 Структура САУ «следуй за мной» проекта «Хамелеон»: Вк – видеокамера; БФЛ – блок формирования образа лидера; БОПЛ – блок определения положения лидера; РУ – решающее устройство; Изл – излучатель измерителя расстояния; БИРдЛ – блок измерения расстояния до лидера; БСР – блок сравнения расстояний; БЗРдЛ – блок задания расстояния до лидера; Пр – приёмник измерителя расстояния
Рис. 7 Структура САУ «следуй за мной» проекта «Хамелеон»: Вк – видеокамера; БФЛ – блок формирования образа лидера; БОПЛ – блок определения положения лидера; РУ – решающее устройство; Изл – излучатель измерителя расстояния; БИРдЛ – блок измерения расстояния до лидера; БСР – блок сравнения расстояний; БЗРдЛ – блок задания расстояния до лидера; Пр – приёмник измерителя расстояния
Fig. 7 Structure of the ‘Follow-me’ automatic control system of the Chameleon project: Вк – video camera; БФЛ – block of the leader image formation; БОПЛ – block of the leader position detection; РУ – decision-making block; Изл – transmitter of distance meter; БИРдЛ – block of distance measuring to the leader; БСР – distance comparator; БЗРдЛ – block of distance setting to the leader; Пр – receiver of the distance meter
Когда малоразмерный БСАК «Спасатель» подходит к непреодолимому для него по габаритам завалу, что определяет оператор, он даёт команду на запуск с модулей «Улей» и «Родник» миниБАС или миниБСАК, которые, преодолев завал, продолжают поисковую операцию.
При обнаружении пострадавшего с помощью установленных на них микрофонов миниБАС или миниБСАК обеспечивают коммуникацию со спасателями, передавая им изображение пострадавшего по видеоканалу. Они также могут передать пострадавшему обезболивающие медикаменты и воду.
Если добраться до пострадавшего нет возможности и ширина проёма позволяет вытащить его волоком, миниБСАК может передать ему трос с карабином, который соединён с лебёдкой, установленной на модуле «Спасатель», и тот может вытянуть пострадавшего к себе. На тросе установлен динамометр, который определяет степень его натяга, и, если она превышает некоторое заданное значение, миниБСАК обследует зацеп и информирует спасателей о нём.
Функционирование САУ ССзМ проекта «Хамелеон» реализуется по двум алгоритмам: «движение за лидером с маяком» и «движение за лидером без маяка». В первом случае осуществляются локация маяка (акустического, оптического или электромагнитного), установленного на лидере системой фиксации его местоположения, и отслеживание расстояния от БСАК до маяка. Во втором – осуществляется привязка БСАК к «лидеру» с помощью системы фиксации и отслеживания заданного визуального образа (использование систем распознавания образов). Структура системы при этом остаётся практически неизменной. При этом в качестве «лидера» может быть выбран либо человек, либо другой БСАК.
На рис. 7 показана структурная схема САУ ССзМ, выполненной по второму варианту. С помощью видеокамеры и блока формирования образа «лидера» фиксируется его образ (по характерным точкам), который передаётся в блок определения положения «лидера». Последний формирует направление движения к «лидеру» и передаёт эти данные автомату управления вектором скорости БСАК. Тот, в свою очередь, с помощью блоков управления мощностью тяговых двигателей и системы поворота базовой платформы начинает движение по направлению к «лидеру». Подойдя к нему на установленное расстояние, которое определяется блоком измерения расстояния до «лидера», заданного блоком задания расстояния до «лидера», отключает автомат управления вектором скорости БСАК, после того как блок сравнения расстояний выдаст команду на его отключение. Команда на отключение поступает, когда сигнал от блока измерения расстояния до «лидера» превысит сигнал от блока задания этого расстояния. При перемещении «лидера» сигнал блока сравнения расстояний отключается и процесс повторяется.
Спасательная операция
Авария на шахте. К месту аварии спешит группа спасателей. За ней на небольшом удалении движется БСАК «Следопыт» (см. рис. 2), управляемый САУ ССзМ (см. рис. 7) с тремя модулями (платформами «Мул») либо с транспортировочной капсулой, установленной на БСАК (рис. 8), либо соединенной с ним тросом или тягой (рис. 9). Они подходят к месту обрушения, высвобождают пострадавшего человека, который идти не может, и укладывают в транспортировочную капсулу. После чего подаётся команда САУ БСКА «Следопыт» «возвращайся домой» (СВД, рис. 10), и последний перевозит пострадавшего в автоматическом режиме в исходную точку. Пункт, из которого он начал своё движение к эпицентру аварии, который продолжает своё движение в автоматическом режиме к эпицентру аварии. Спасатели выполняют работы по ликвидации последствий аварии.
 Рис. 8 Установка транспортировочной капсулы на БСАК
Рис. 8 Установка транспортировочной капсулы на БСАК
Fig. 8 Installation of the transport capsule over the unmanned self-propelled wheeled vehicle
 Рис. 9 Соединение транспортировочной капсулы с БСАК тягой
Рис. 9 Соединение транспортировочной капсулы с БСАК тягой
.Fig. 9 Attachment of the transport unmanned self-propelled wheeled vehicle using a towbar
БСКА после передачи пострадавшего в пункте назначения медицинскому персоналу по команде САУ СВД снова перемещается в автоматическом режиме к эпицентру аварии (к спасателям). Такое перемещение БСАК в автоматическом режиме может осуществлять в течение 3–4 ч в зависимости от степени разрушений в шахте.
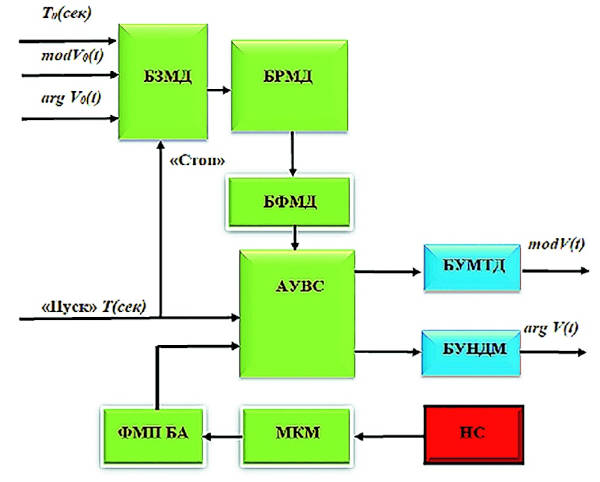 Рис. 10 Структура САУ «возвращайся домой» проекта «Хамелеон»: БЗМД – блок записи маршрута движения; БРМД – блок реверса маршрута движения; БФМД – блок формирования маршрута движения; АУМС – автомат управления вектором скорости наземного транспортного средства; БУМТД – блок управления мощностью тягового двигателя; БУНДМ – блок управления направлением движения модуля; ФМП БА – формирователь местоположения беспилотного автомата; МКМ – модель карты местности; НС – навигационная система (инерциальная, спутниковая, по маякам и т.п.)
Рис. 10 Структура САУ «возвращайся домой» проекта «Хамелеон»: БЗМД – блок записи маршрута движения; БРМД – блок реверса маршрута движения; БФМД – блок формирования маршрута движения; АУМС – автомат управления вектором скорости наземного транспортного средства; БУМТД – блок управления мощностью тягового двигателя; БУНДМ – блок управления направлением движения модуля; ФМП БА – формирователь местоположения беспилотного автомата; МКМ – модель карты местности; НС – навигационная система (инерциальная, спутниковая, по маякам и т.п.)
Fig. 10 Structure of the ‘Return-to- Home-Position’ automatic control system of the Chameleon project: БЗМД – block of the travel route recording; БРМД – block of the travel route reversal; БФМД – block of the travel route formation; АУМС – automatic speed vector control block for the ground vehicle; БУМТД – block of the traction engine power control; БУНДМ – block of the module's direction control; ФМП БА – automatic unmanned vehicle positioner; МКМ – model of the terrain map; НС – navigation system (inertial, satellite, by beacons, etc.).
САУ СВД (см. рис. 10) проекта «Хамелеон» работает следующим образом. На пути к заданной точке маршрута с помощью блока записи маршрута движения записываются все параметры движения БСАК, а именно: время движения, значение модуля вектора скорости движения и значение аргумента вектора скорости.
Эти параметры передаются в блок реверса маршрута движения, который формирует обратную задачу. Движение по указанным в блоке записи маршрута движения реперам программы движения БСАК по этому же маршруту в обратную сторону. На основании этих данных блок формирования маршрута движения составляет необходимую матрицу команд управления автоматом управления вектором скорости наземного транспортного средства. Помимо этого, навигационная система (инерциальная, спутниковая, по маякам и т.п.) создаёт математическую модель местности, по которой был проложен первоначальный маршрут движения БСАК. Данная модель позволяет формирователю местоположения беспилотного автомата определить точку начала отсчёта для работы блока формирования маршрута движения. При нажатии кнопки «Пуск» блокируется запись исходных данных для продолжения формирования маршрута движения (она же кнопка «Стоп» для блока записи маршрута движения) и включается в работу автомат управления вектором скорости наземного транспортного средства, получающий необходимую информацию от блока формирования маршрута движения.
Операция по ликвидации пожара в шахте
Пожар в шахте. К месту пожара направляются горноспасательные отделения. За ними на небольшом удалении движется БСАК «Пожарник» (рис. 11), управляемый САУ ССзМ (см. рис. 7), с тремя и более модулями (одним «Пожарник» и несколькими «Мул», нагруженными баками с жидкостью для тушения огня или огнетушителями-гранатами). Они подходят к месту пожара на минимально возможное (по температурному режиму) расстояние. Оно определяется по показаниям болометра или тепловизора, которым оснащён модуль «Пожарник».
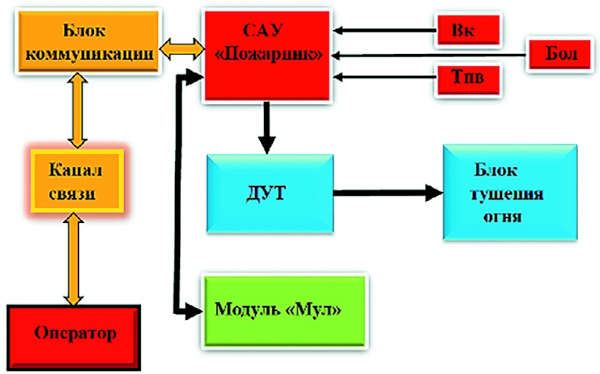 Рис. 11 Структура САУ модуля «Пожарник» проекта «Хамелеон»: Вк – видеокамера; Бол – болометр; Тпл – тепловизор
Рис. 11 Структура САУ модуля «Пожарник» проекта «Хамелеон»: Вк – видеокамера; Бол – болометр; Тпл – тепловизор
Fig. 11 Structure of the FireFighter Module automatic control system of the Chameleon project: Вк – video camera; Бол – bolometer; Тпл – thermal imager
После чего БСАН приступает к ликвидации пожара. Этот процесс осуществляется с использованием двух возможных вариантов тушения. В первом случае осуществляется заливка огня противопожарной жидкостью или пеной (рис. 12) из брандспойта, а также шарами-огнетушителями (рис. 13) из пневмопушки, установленными на ДУТ. Для тушения пеной применяется блок тушения огня, выполненный по схеме на рис. 14. Для тушения шарами-огнетушителями этот блок выполняется по схеме, представленной на рис. 15.
 Рис. 12 Заливка очага огня пеной
Рис. 12 Заливка очага огня пеной
Fig. 12 Fighting the fire seat with foam
 Рис. 13 Шар-огнетушитель
Рис. 13 Шар-огнетушитель
Fig. 13 Ball-shaped fire extinguisher
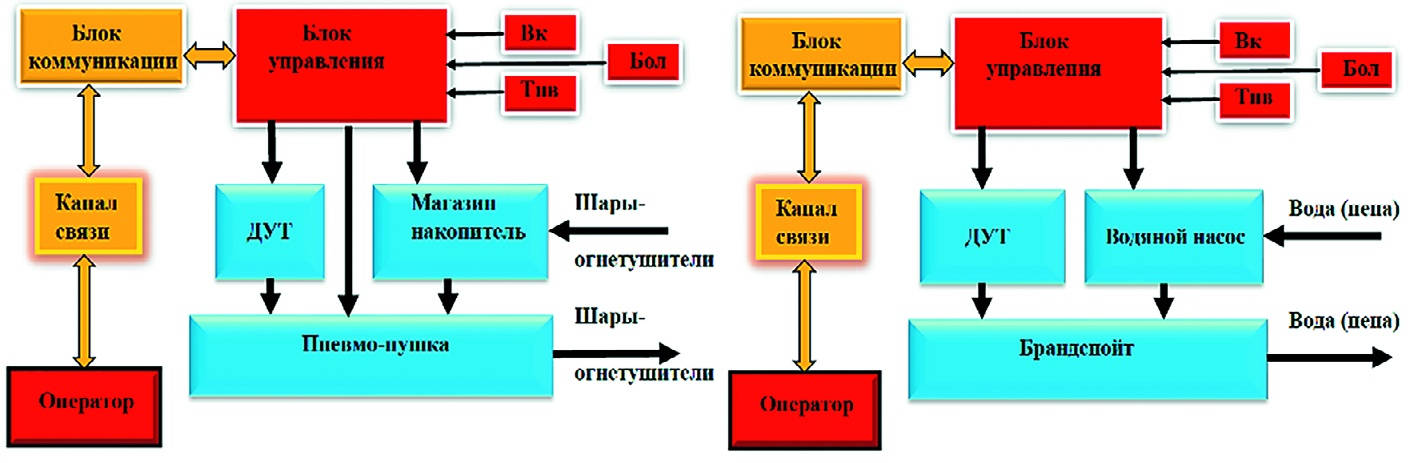 Рис. 14 Блок тушения огня с помощью брандспойта проекта «Хамелеон» Fig. 14 Unit of fire extinguishing using a fire hose of the Chameleon project
Рис. 14 Блок тушения огня с помощью брандспойта проекта «Хамелеон» Fig. 14 Unit of fire extinguishing using a fire hose of the Chameleon project
Рис. 15 Блок тушения огня с помощью шаров- огнетушителей проекта «Хамелеон» Fig. 15 Unit of fire extinguishing using the ball-shaped fire extinguishers of the Chameleon project
Используя БСАК «Пожарник», горноспасатели выполняют работы по ликвидации пожара, не находясь в опасной близости от него.
Последнее, что мы хотели бы описать в данной работе, это командная система телеуправления (КСТУ, рис. 16), которая содержит станцию управления – базу коммуникации оператора, и бортовую станцию, находящуюся на борту БСАК, между которыми установлена радиосвязь в одном из существующих стандартов (рис. 17).
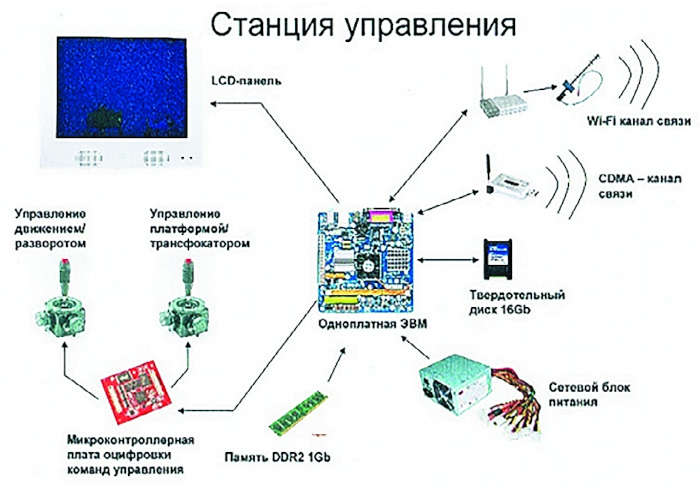
 Рис. 16 КСТУ с каналом УКВ связи
Рис. 16 КСТУ с каналом УКВ связи
Fig. 16 A telecontrol command system with the ultrashort waves communication channel
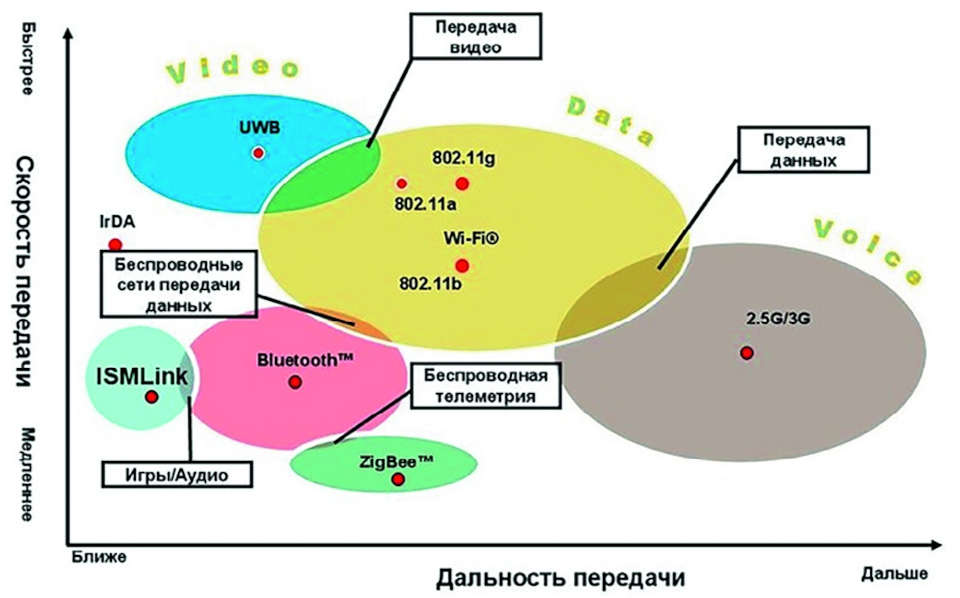 Рис. 17 Стандарты беспроводной связи
Рис. 17 Стандарты беспроводной связи
Fig. 17 Standards of wireless communication
Станция управления содержит два периферийных устройства; пульт и монитор, которые позволяют осуществлять коммуникацию оператора с БСАК. КСТУ движением модуля «Следопыт» обеспечивает оператору коммуникацию с БСАК, служит для него источником информации о внешней среде и состоянии последнего. КСТУ служит для решения не формализуемых в настоящее время задач (в открытых системах). В КСТУ решения и правила поведения объекта управления определяет оператор на основании полученной с его борта информации. Такие системы используются в основном при создании блоков коррекции команд управления оператора вектором скорости БСАК для прохождения заданного маршрута движения, определения его местоположения и мониторинга местности [1].
Они требуют постоянного вмешательства в процесс управления оператора, которое происходит в настоящее время в основном через пульты управления кнопочного (рис. 18) или джойстикового (рис. 19) типа.
 Рис. 18 Кнопочный пульт управления
Рис. 18 Кнопочный пульт управления
Fig. 18 Push-button control panel
 Рис. 19 Джойстиковый пульт управления
Рис. 19 Джойстиковый пульт управления
Fig. 19 Joystick control panel
Для модуля «Следопыт» необходимо восемь основных команд управления (табл. 1). Первоначально были попытки совместить команды с целью уменьшения кнопок управления, но затем от этой идеи отказались, слишком сложно было управлять БСАК, используя их комбинации [2].
Таблица 1 Список команд управления движением базового модуля
Table 1 List of motion control commands of the Basic Module
Для того чтобы освободить руки оператора, нами разрабатывается система голосового управления БСАК, которая в состоянии с высокой степенью надёжности понимать и выполнять целый ряд примитивных команд типа «стоять», «вперед», «назад» и другие подобные. Команды взяты из набора основных команд, с помощью которых управляют служебными собаками. Спасатель должен быть избавлен от необходимости использовать какие-либо пульты управления, чтобы его руки были свободными и чтобы ничто не отвлекало его внимания. Это особо важно в случае ликвидации аварий и пожаров на шахте, при отслеживании возможных обрушений и выполнении поисковых работ. Пока такие системы ненадёжны и вряд ли будут в ближайшее время использоваться при выполнении операций по ликвидации аварий, поскольку голосовые команды пока трудно выделить на фоне шума в эпицентре аварии или вблизи пожара на фоне голосов спасателей.
Разработчикам БСАН следует обратить внимание на возможность создания КСТУ с использованием пультов, реагирующих на положение рук оператора в пространстве.
Такие бесшумные приёмы коммуникации используют бойцы-разведчики и диверсанты при выполнении своих операций, и на сегодня это направление считается более перспективным, чем создание систем голосовых команд. Нами ведётся также разработка цифровой перчатки (рис. 20), которая позволит шахтёрам подавать БСАК команды с помощью языка жестов.
 Рис. 20 Пульт-перчатка
Рис. 20 Пульт-перчатка
Fig. 20 A glove-shaped remote control
Для облегчения работы операторов, управляющих БСАК, была разработана система дистанционного присутствия, которая представляет специально разработанную видеокамеру, передающую изображение на носимый блок управления с дисплеем, закрепляющийся на голове в шлеме шахтёра (рис. 21). Блок снабжен специальными датчиками, регистрирующими изменение положения всей конструкции в пространстве. Благодаря этому управлять видеокамерой оператор может путем поворота или наклона головы без использования пульта управления.
 Рис. 21 Вирт-шлем
Рис. 21 Вирт-шлем
Fig. 21 A VR helmet
Изображение и звук с тридцати бортовых сенсоров системы, включающих цифровые видеокамеры, приборы ночного видения, инфракрасные датчики, микрофоны и лазерный радар для создания подробных трехмерных карт местности, будут передаваться по беспроводному протоколу WLAN на дисплей, встроенный в каску шахтёра. Эти сведения БСАК «Следопыт» будет посылать на платформу «Хамелеон», где из этой информации будет создаваться и передаваться оператору через маяковую систему подробный макет местности в режиме реального времени.
По сравнению с обычными видеокамерами, транслирующими сигнал на монитор, эта система позволяет оператору фактически оказаться на месте БСАК. В результате существенно повышается скорость принятия решений и, соответственно, успех выполняемой спасателями операции в целом.
В настоящее время проводная связь для управления БСАН практически не используется. Исключением являются БСАН для обследования местности на небольшом расстоянии от оператора, и то – частично. Около 5% управляется по лазерному лучу, остальные управляются по радиоканалу. Управление по лазерному лучу имеет неоспоримое преимущество в плане передачи огромного объёма информации и точности управления. Однако такое управление имеет и ряд существенных недостатков: управление только в пределах прямой видимости, невозможность передачи команд в тумане, пыли, дыму и т. п.
Основным недостатком КСТУ являются ограничения, обусловленные необходимостью применения широкополосного (УКВ) канала связи, который ограничивает радиус действия БСАК с такими системами 1,5–2,5 км прямой видимости. При использовании систем с ретрансляцией сигнала радиус функционирования уже ничем не ограничен.
Как показал анализ КСТУ используемых малоразмерных БСАК, радиус действия для большинства из них те же 1,5– 2,5 км (зона прямой видимости), больше и не нужно. Это обусловлено спецификой их функционирования. Обычно БСАК взаимодействует непосредственно с шахтёрами, спасателями, поэтому он должен быть рядом. Если шахтёры будут рассредоточены больше, чем на эти 1,5–2,5 км, то они не смогут эффективно вести поисковые и спасательные действия даже при наличии у них отличной связи, так и с БСКА. Они должны быть в зоне видимости шахтёра-оператора.
На шахтах АО «СУЭК-Кузбасс» внедрена система с ретрансляцией сигнала типа «SBGPS» («Гранч»), осуществляющая непрерывно в режиме реального времени определение местоположения человека (техники) в шахте с точностью позиционирования ±4 м, с возможностью передачи данных на сервер системы по каналам связи, организованным с использованием технологий Ethernet (ВОЛС и/или SBNI) и Wi-Fi (протокол IEEE 802.11 b/g/n/i), но такие системы слишком дороги и не везде в шахтах могут быть применены. Интеграция системы «SBGPS» с программным комплексом «Вентиляция» позволяет в режиме реального времени управлять навигацией людей, а также техники по шахте до выходов из шахты. Маршрут движения и пункт назначения могут определяться для каждого человека (техники) как в автоматическом, так и в ручном режиме.
Для канала управления модулем «Следопыт» была разработана и испытана КСТУ, обеспечивающая устойчивую связь БСАН с оператором на расстоянии до 3,5 км по УКВ каналу (см. рис. 16) с передачей информации с борта на цветной монитор и управление параметрами его движения с помощью джойстика.
Заключение и основные выводы
Созданные в рамках концепции конструкции БСАК обладают следующими достоинствами:
– максимально возможной простотой конструкции базовых модулей за счёт соединённых модулей специальным сцепным устройством;
– минимально возможной массой;
– максимально возможной надёжностью;
– высокой ремонтопригодностью, неисправный модуль может быть просто исключён из состава «змеи» БСАК;
– высокой проходимостью, низкий центр тяжести наряду с гибкой связью между модулями обеспечивает ему высокую устойчивость к переворотам при наезде на практически любые препятствия, наряду с высокой проходимостью по сильно пересечённой местности из-за многомодульности конструкции. БСАК проекта «Хамелеон» по проходимости намного превосходит все представленные на сегодня колёсные аппараты, при этом он конструктивно проще;
– высокими показателями пассивных параметров боковой и продольной устойчивости;
– более простой организацией активных САУ боковой и продольной устойчивости. Так, если передний модуль съедет в воронку (яму), гироскоп сможет это зафиксировать, и оставшиеся в сцепке модули смогут автоматически вытащить его из этой воронки. Аналогичная ситуация с наездом первого модуля на большое (высокое) препятствие на пути его следования;
– широкой возможностью модернизации уже функционирующего БСАК. Для изменения функционала БСАК можно менять в его составе отдельные модули, обладающие новыми функциями или выполненные на новой элементной базе, которые могут быть интегрированы в существующий уже БСАК или использованы для замены каких-либо модулей в нём. Концепция многомодульной конструкции и специально разработанного для него сцепного устройства, позволяет многократно менять конфигурацию БСАК, наращивать и переформатировать его под выполнение конкретных задач.
Основной вывод, который можно сделать по изложенной нами концепции, следующий: наиболее приемлемой конструкцией БСА для работы в шахте можно считать многомодульную многофункциональную конструкцию БСАК, созданного и испытанного по результатам проведённой нами НИР в рамках проекта «Хамелеон». Его работа была продемонстрирована на одном из ведущих телевизионных каналов (Россия 1).
Используемая концепция конструирования многомодульных многофункциональных БСАК позволяет создавать на данных принципах не только мини- и малоразмерные БСАК, но и средние, и тяжёлые, позволяющие устанавливать на них проходческое оборудование (рис. 22).
 Рис. 22 Машины для добычи угля
Рис. 22 Машины для добычи угля
Fig. 22 Coal mining machines
Считаем, что необходимо как можно быстрее провести всю необходимую ОКР и начать серийный выпуск проекта «Хамелеон», например, на одном из предприятий СУЭК, в рамках программы замещения импортного оборудования с перспективой экспорта не только в страны с развивающейся экономикой, но и в страны с высоким уровнем технологий.
Список литературы
1. Борейшо А.С. (ред.) Военные применения лазеров. СПб.: Балтийский гос. тех. ун-т; 2015. 103 с.
2. Цибулевский И.Е. Человек как звено следящей системы. М.: Наука; 1981. 288 с.










