


Метод оптимизации параметров программно-аппаратных средств систем удаленного мониторинга карьерных автосамосвалов на основе распознавания QR-кода
 Р.Н. Сафиуллин1, Х. Тянь1, Р.Р. Сафиуллин1, М.Р. Баширов2, Е.Г. Козин3
Р.Н. Сафиуллин1, Х. Тянь1, Р.Р. Сафиуллин1, М.Р. Баширов2, Е.Г. Козин3
1 Санкт-Петербургский горный университет императрицы Екатерины II, г. Санкт-Петербург, Российская Федерация
2 Межрегиональное территориальное управление Федеральной службы по надзору в сфере транспорта по Северо-Западному федеральному округу, г. Санкт-Петербург, Российская Федерация
3 Санкт-Петербургское государственное унитарное предприятие «Петербургский метрополитен», г. Санкт-Петербург, Российская Федерация
Russian Mining Industry №1S / 2025 p. 14-20
Резюме: В статье представлена система мониторинга на основе технологии QR-кодов, включающая в себя модули управления, генерации QR-кодов, распознавания, передачи и обработки данных, а также центральную платформу мониторинга. С целью повышения степени идентификации QR-кода в состоянии движения, исследования взаимосвязи между несколькими влияющими факторами и степенью идентификации QR-кода было проведено оптимизационное экспериментальное исследование, основанное на методе поверхности отклика. Результаты показывают, что степень влияния различных факторов на распознавание QR-кода имеет следующий вид: скорость движения > расстояние считывания > размер QR-кода > кодированные символы. При оптимальных условиях эксперимента, в котором расстояние считывания составляет 141,45 мм, размер кода – 34,58 мм, 100 байт закодированных символов и скорости движения равной 2,98 м/мин, среднее значение читаемости QR-кода составило 95%. Результаты показывают, что оптимизация параметров влияющих факторов может значительно улучшить степень идентификации QR-кода, тем самым повышая функциональную эффективность системы мониторинга.
Ключевые слова: искусственный интеллект, автоматизированные системы мониторинга, программно-аппаратные средства контроля, идентификация, объект распознавания, QR-код
Для цитирования: Сафиуллин Р.Н., Тянь Х., Сафиуллин Р.Р., Баширов М.Р., Козин Е.Г. Метод оптимизации параметров программно-аппаратных средств систем удаленного мониторинга карьерных автосамосвалов на основе распознавания QR-кода. Горная промышленность. 2025;(1S):14–20. https://doi.org/10.30686/1609-9192-2025-1S-14-20
Информация о статье
Поступила в редакцию: 29.12.2024
Поступила после рецензирования: 31.01.2025
Принята к публикации: 03.02.2025
Информация об авторах
Сафиуллин Равилл Нуруллович – доктор технических наук, профессор кафедры транспортно-технологических процессов и машин, Санкт-Петербургский горный университет императрицы Екатерины II, г. Санкт-Петербург, Российская Федерация; https://orcid.org/0000-0002-8765-6461; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Тянь Хаотянь – аспирант кафедры транспортно-технологических процессов и машин, Санкт-Петербургский горный университет императрицы Екатерины II, г. Санкт-Петербург, Российская Федерация; https://orcid.org/0000-0002-8963-109X; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Сафиуллин Руслан Равиллович – кандидат технических наук, доцент кафедры транспортно-технологических процессов и машин, Санкт-Петербургский горный университет императрицы Екатерины II, г. Санкт-Петербург, Российская Федерация; https://orcid.org/0000-0003-2315-3678; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Баширов Мансур Рустамович – заместитель начальника управления (Госавтодорнадзор – г. Санкт-Петербург), Межрегиональное территориальное управление Федеральной службы по надзору в сфере транспорта по Северо-Западному федеральному округу, г. Санкт-Петербург, Российская Федерация
Козин Евгений Германович – кандидат технических наук, начальник Санкт-Петербургского государственного унитарного предприятия «Петербургский метрополитен», г. Санкт-Петербург, Российская Федерация; e-mail: Адрес электронной почты защищен от спам-ботов. Для просмотра адреса в вашем браузере должен быть включен Javascript.
Введение
В условиях цифровой трансформации горнодобывающей промышленности точный и комплексный мониторинг информации о местоположении, техническом состоянии и производительности горного оборудования, включая карьерные автосамосвалы [1–3], с использованием программно-аппаратных средств контроля, установленных на технике, горных дорогах, а также передача этих данных в информационно-диспетчерский центр горнодобывающего предприятия составляют основу функционирования автоматизированной системы управления горнотранспортными комплексами (далее – АСУ ГТК).
Одним из важных оснований разработки стратегического направления в области цифровой трансформации топливно-энергетического комплекса до 2030 г. является Указ Президента Российской Федерации от 10 октября 2019 г. №490 «О развитии искусственного интеллекта в Российской Федерации». По мере того как крупные горнодобывающие компании начинают внедрять беспилотную технику для повышения эффективности, безопасности и технического обслуживания горных работ, растет спрос на автономные транспортные системы, поддержку которых обеспечивает искусственный интеллект [4–6]. В настоящее время введен ряд национальных стандартов1, которые определяют минимальный состав функциональных подсистем систем искусственного интеллекта в транспортной отрасли, варианты их использования и общие требования к испытанию алгоритмов искусственного интеллекта.
В целях улучшения значений критериев, показателей и метрик алгоритмов искусственного интеллекта, дополнительные данные для обнаружения и распознавания объектов контроля могут быть получены из различных источников с помощью технических средств восприятия визуальной информации и осуществляться при помощи технологии низкоуровневого слияния (мультисенсорной интеграции) данных. В настоящее время идентификация объектов контроля в открытых карьерах с одновременным формированием измерительной информации реализуется с помощью программно-аппаратных комплексов контроля, рассматривается как совокупность двух подсистем: измерения и распознания [7; 8].
Существующая система мониторинга на базе GPS в основном предоставляет информацию о местоположении транспортных средств и оборудования с ограниченной функциональностью, трудно обеспечить эффективный сбор и передачу информации в условиях слабого сигнала в районе горных работ и во время непогоды [9–11]. В качестве дополнения к функциональности и точности информации общих систем мониторинга на базе GPS разработана автоматизированная система удаленного мониторинга транспортных средств на основе матричного QR-кода, защищенная патентом (Патент №2792386 C1 Российская Федерация, МПК G01M 15/05, опубл. 21.03.2023) [12]. Разработанный в рамках исследования автоматизированный программно-аппаратный комплекс «Онлайн-мониторинг технического состояния транспортных средств (ОМТС-Q1)» при помощи технологии QR-кода способствует проведению экспериментальных исследований (рис. 1).
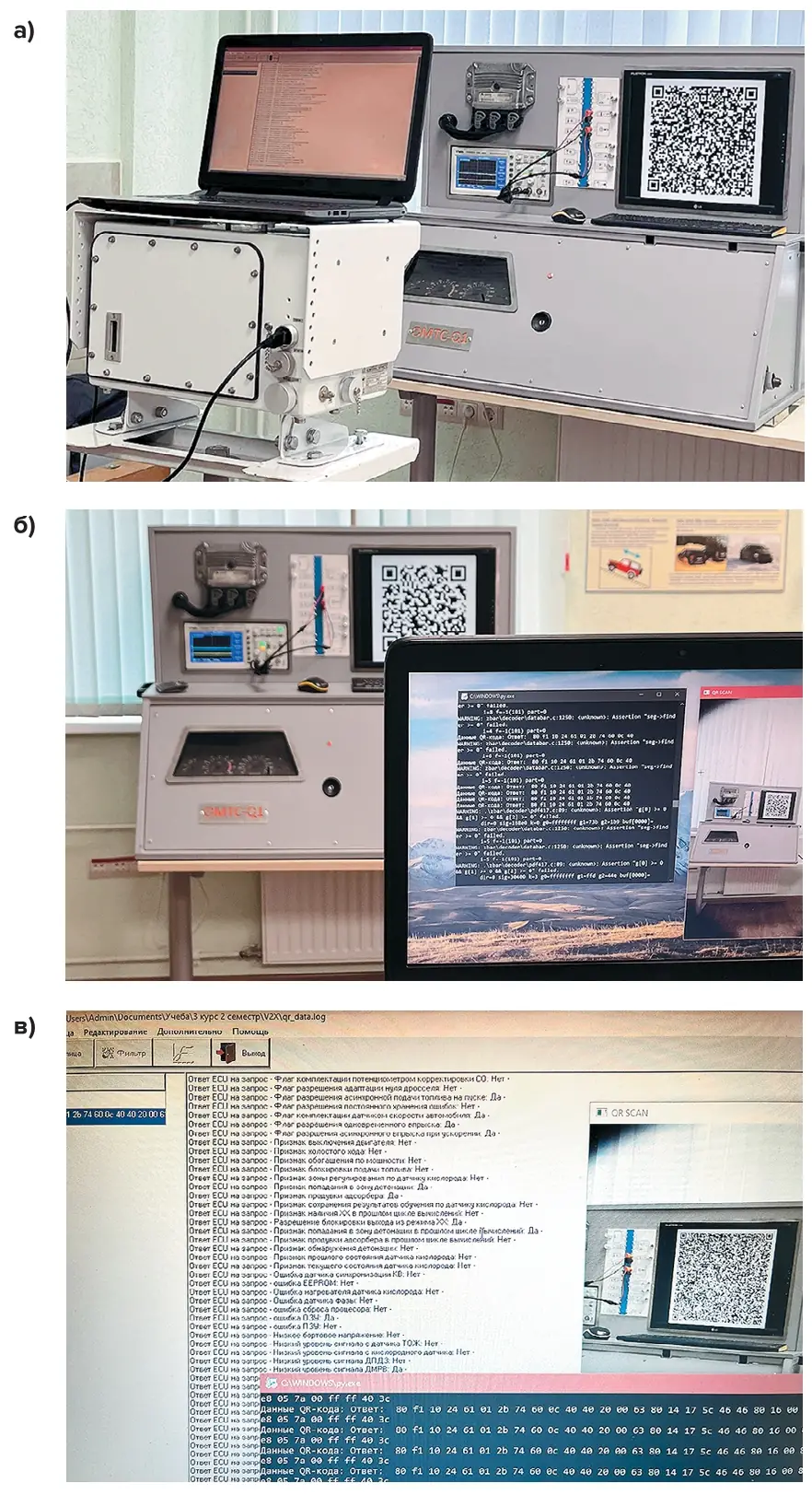 Рис. 1 Схема работы аппаратно-программного комплекса «ОМТС-Q1»
Рис. 1 Схема работы аппаратно-программного комплекса «ОМТС-Q1»
Fig. 1 Operation scheme of the ОМТС-Q1 hardware-software complex
Учитывая тот факт, что использование телематических автоматизированных систем для мониторинга и управления карьерными автосамосвалами требует сбора, хранения, передачи и обработки большого количества информационных данных, необходимых для принятия оптимальных организационно-управленческих решений, предполагается способность программно-аппаратных средств точно и надежно выполнять задачу распознавания и идентификации. В связи с этим обобщенным критерием для рационального оснащения программно-аппаратных средств системы управления определена степень идентификации Pi, которая напрямую влияет на эффективность функционирования системы управления. В данной статье метод поверхности отклика (RSM, response surface methodology) используется для оптимизации дизайна экспериментов по факторам, влияющим на степень распознавания QR-кода в состоянии движения в диапазоне, допустимом условиями эксперимента. Полученные выводы могут подтвердить технические требования к измерительному оборудованию для системы мониторинга на основе QR-кода и послужить полезным ориентиром для рационального выбора и размещения оборудования для распознавания и обнаружения.
Материалы и методы
К основным компонентам системы мониторинга на основе распознавания QR-кода относятся следующие элементы: – модуль генерации QR-кодов. Каждое горнотранспортное средство оснащено устройством для генерации динамического QR-кода, которое в режиме реального времени генерирует QR-код, содержащий соответствующую информацию в зависимости от состояния транспортного средства (например, местоположение, скорость, загрузка и т. д.) [13];
– модуль управления. Данный элемент с помощью специализированного датчика собирает данные о работе транспортного средства и кодирует их для создания QR-кода;
– измерительные приборы для идентификации и обнаружения (модуль распознавания). Камеры высокого разрешения или сканирующие устройства устанавливаются на открытых карьерных дорогах для захвата изображений QR-кода, размещенного на транспортном средстве, в режиме реального времени [14];
– модуль передачи и обработки данных. Идентификационное оборудование передает полученную с QR-кода информацию в центральную систему управления, которая декодирует и анализирует ее;
– центральная платформа мониторинга. Данный элемент используется для хранения и анализа данных о работе транспортных средств, а также для выдачи предупреждений о нештатных ситуациях с целью последующей оптимизации управленческих решений [15].
Существенные факторы эксплуатации (СФЭ) влияют на функционирование системы управления, определяя объект распознавания или его окружение либо внося те или иные вариации во входные данные, которые существенным образом могут влиять на выходные результаты работы системы. СФЭ в общем могут относиться к воспринимаемой измерительными средствами сцене целиком и каждому отдельному объекту распознавания в частности.
Способность фокусировки и эффект изображения измерительных устройств (например, камер смартфонов или сканеров QR-кодов) варьируются в зависимости от расстояния, что, в свою очередь, влияет на распознавание QR-кодов. Таким образом, расстояние считывания принято в качестве фактора, влияющего на степень идентификации QR-кода. Размер кода был тестовым фактором, соответствующим размеру модуля при заданном разрешении принтера. Хотя размер кодированных символов не влияет непосредственно на скорость чтения при фиксированном расстоянии, в данном исследовании этот фактор также учитывался при переменном расстоянии и движущейся обработке. В отличие от статического состояния, скорость перемещения была важным фактором в процессе движения. Были отобраны четыре фактора и проведено предварительное лабораторное исследование, целью которого было получение диапазона значений факторов [16; 17].
Система удаленного мониторинга карьерных транспортных средств на основе распознавания QR-кодов, оснащенная моделями искусственного интеллекта, с помощью технологии слияния объединяет множество источников данных, включая техническое состояние транспортного средства, идентификационную информацию QR-кода и данные мониторинга окружающей среды, что, в свою очередь, позволяет осуществлять мониторинг в режиме реального времени и точно планировать работу транспортных средств [18; 19]. Однако в связи со сложной и меняющейся обстановкой в горнодобывающей промышленности читаемость и точность распознавания QR-кода могут пострадать. Именно поэтому оптимизация степени идентификации QR-кода стала ключевым вопросом для повышения эффективности функционирования системы.
Метод RSM является статистическим инструментом, который позволяет оценить влияние независимых переменных, отдельно или в совокупности, и их воздействие на переменные отклика, что позволяет развивать, улучшать и оптимизировать такой процесс. Кроме того, RSM определяет влияние независимых переменных на процесс и генерирует математическую модель, которая точно его описывает. По результатам предварительных испытаний был разработан дизайн из четырех числовых факторов (расстояние считывания, размер кода, кодированные символы и скорость) с пятью уровнями. Полученные данные были подвергнуты статистическому анализу с помощью программы DesignExpert с целью оптимизации параметров считывания. Значимое влияние независимых переменных на каждый ответ было определено с помощью дисперсионного анализ уравнения регрессии (ANOVA). В результате множественного линейного регрессионного анализа экспериментальных данных были получены полиномиальные модели второго порядка, применяемые для прогнозирования считываемости QR-кода.
Результаты
Таблица 1 Результаты дисперсионного анализа уравнения регрессии степени идентификации QR-кода
Table 1 Results of the variance analysis of regression equation for the QR code identification efficiency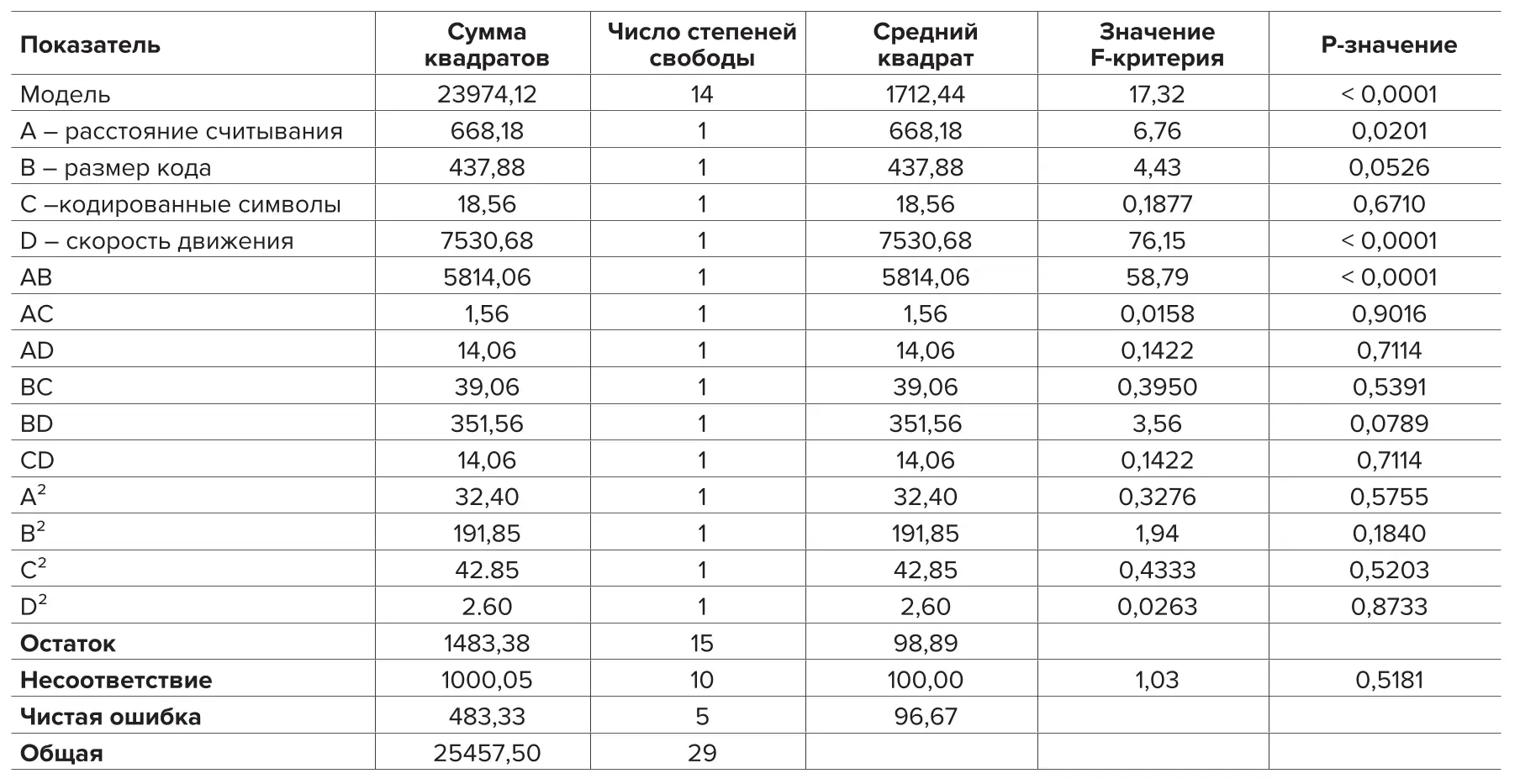
Эксперименты проводились в соответствии с матрицей дизайна программного обеспечения DesignExpert. Для оценки значимости модели на 95-процентном доверительном уровне использовался статистический тест F-значение. Результаты квадратичной модели в форме ANOVA приведены в табл. 1. Значение F-критерия, равное 17,32, свидетельствует о значимости модели. Вероятность того, что значение F может быть получено из-за шума, составляет всего 0,01%. Кроме того, значения P, меньшие 0,05, указывают на то, что условия модели значимы. Незначительный уровень подгонки указывает на хорошую подгонку модели. В результате регрессии тестовых данных квадратичная модель в терминах фактических факторов была выражена следующим образом:
Y = 107,445 + 0,180304 * A + 1,93546 * B + -1,02543 * C + 1,54444 * D + 0,00871429 * AB + -8,92857e-05 * AC + 0,0142857 * AD + -0,0015625 * BC + 0,25 * BD + -0,03125 * CD + -0,00182247 * A^2 + -0,0543252 * B^2 + 0,0100292 * C^2 + -7,02805 * D^2 , (1)
где Y – степень идентификации QR-кода; A – расстояние считывания; B – размер кода; C – кодированные символы; D – скорость перемещения объекта распознавания.
Табл. 1 и уравнение (1) показывают, что уровень влияния факторов на степень идентификации QR-кода можно представить следующим образом: скорость перемещения объекта распознавания > расстояние считывания > размер QR-кода > кодированные символы. Основные факторы (расстояние считывания и скорость перемещения) оказывают значительное влияние на ответ (P < 0,05). Существует значительное взаимодействие между расстоянием считывания и размером QR-кода, которое оказывает большое влияние на степень идентификации QR-кода. Связи между основными факторами и откликом представлены на рис. 2.
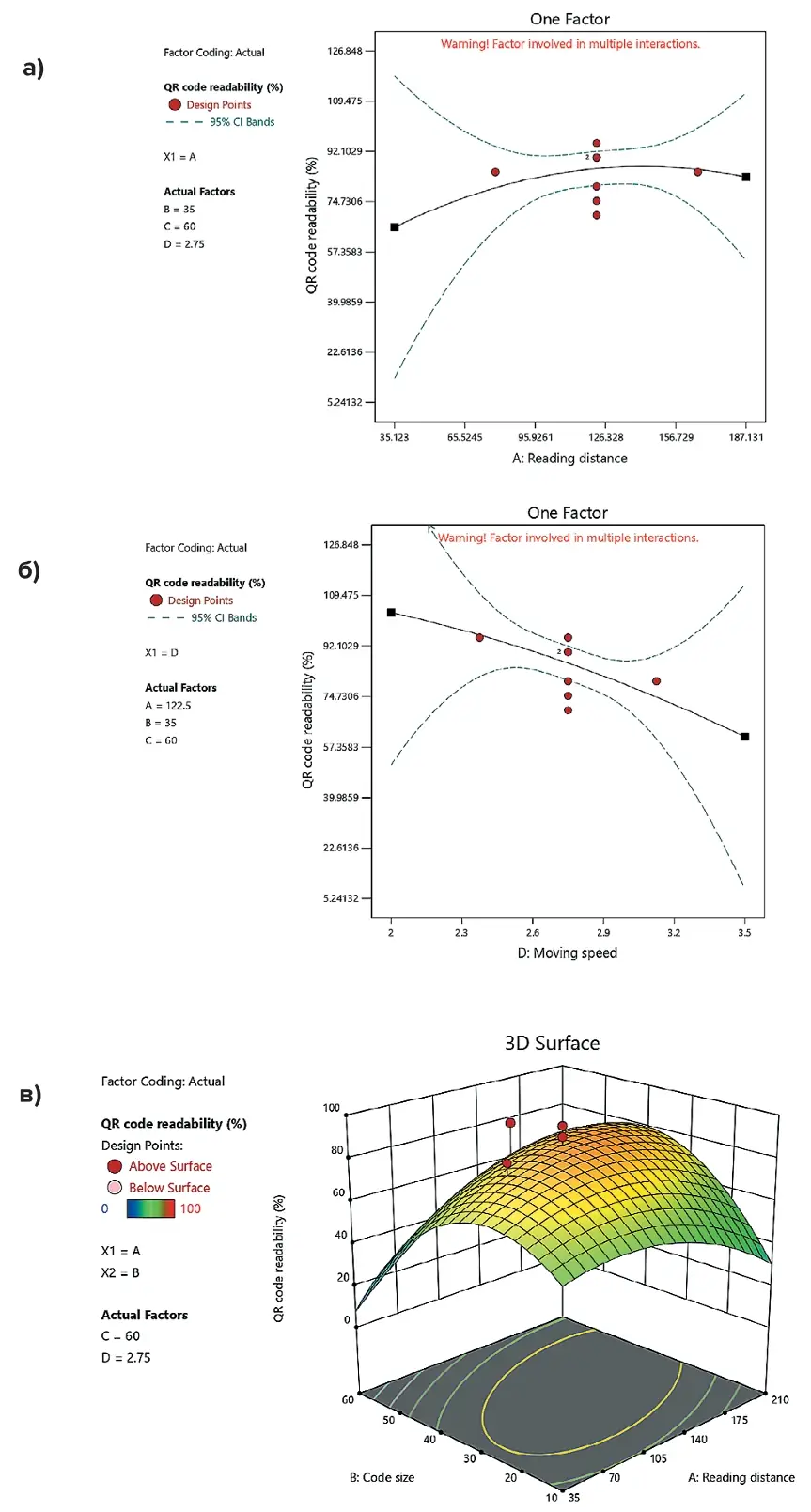 Рис. 2 Диаграмма взаимосвязи между значимыми факторами и степенью идентификации QR-кода: а – диаграмма зависимости между расстоянием считывания и степенью идентификации QR-кода; б – диаграмма зависимости между скоростью перемещения и степенью идентификации QR-кода; в – поверхность отклика, зависящая от расстояния считывания, размера кода и степени идентификации QR-кода
Рис. 2 Диаграмма взаимосвязи между значимыми факторами и степенью идентификации QR-кода: а – диаграмма зависимости между расстоянием считывания и степенью идентификации QR-кода; б – диаграмма зависимости между скоростью перемещения и степенью идентификации QR-кода; в – поверхность отклика, зависящая от расстояния считывания, размера кода и степени идентификации QR-кода
Fig. 2 An interrelation diagram of the significant factors and the QR code identification efficiency: а – a dependence diagram of the reading distance and the QR code identification efficiency; б – a dependence diagram of the travelling speed and the QR code identification efficiency; в – the response surface depending on the reading distance, QR code size and the QR code identification efficiency
Диаграмма зависимости между расстоянием считывания и степенью идентификации QR-кода при сохранении постоянства остальных факторов на среднем уровне представлена на рис. 2, а. Очевидно, что степень идентификации QR-кода увеличивается с увеличением расстояния считывания от 35 до 140 мм. Однако дальнейшее увеличение расстояния считывания более 140 мм привело к снижению степени идентификации QR-кода. Это свидетельствует о том, что слишком маленькое или слишком большое расстояние не подходят для считывания.
На рис. 2, б показана зависимость между скоростью перемещения и степенью идентификации QR-кода при сохранении других факторов на среднем уровне. Тенденция к снижению степени идентификации QR-кода сохранялась при увеличении скорости движения. Когда скорость превышает 3,5 м/мин, считываемость (степень идентификации) составляет менее 61%. Это связано с тем, что время считывания каждого кода уменьшается с увеличением скорости.
На рис. 2, в показана сильная взаимосвязь между расстоянием считывания и размером QR-кода. Изменение читаемости QR-кода с расстоянием считывания имело тенденцию к увеличению, а затем к уменьшению, как и было показано в однофакторном анализе. С увеличением размера кода степень идентификации QR-кода увеличивалась, а затем уменьшалась. Это также указывает на то, что QR-код имеет хорошую скорость считывания в диапазоне комбинации среднего значения размера кода и расстояния считывания.
Для получения оптимальных параметров, обеспечивающих высокую читаемость, был использован метод оптимизации, предусмотренный программой DesignExpert.
Группа оптимальных решений с теоретической читаемостью 97,03% была получена при расстоянии считывания 141,45 мм, размере QR-кода 34,58 мм, 100 байтах закодированных символов и скорости движения 2,98 м/мин. Для круглых чисел было проведено 20 тестов при следующих условиях: 141 мм, 35 мм, 100 байт и 3,00 м/мин. Среднее значение считываемости QR-кода составило 95 %, а относительное отклонение – 2,1 %. Это показывает, что при оптимальном параметре считываемости скорость считывания была высокой, а эффективность – хорошей.
Метод искусственных нейронных сетей (далее – ANN) обладает высокой обучаемостью и способностью идентифицировать и моделировать сложные нелинейные зависимости между входом и выходом системы [20]. Для сравнения метода RSM и метода ANN была использована модель ANN с тремя слоями. Как показано на рис. 3, во входном слое было четыре нейрона, включая расстояние считывания, размер QR-кода, закодированные символы и скорость движения. Скрытый слой содержал 10 нейронов. В качестве одного выходного нейрона использовалась читаемость QR-кода. От входного слоя к скрытому слою использовалось обратное распространение Левенберга-Марквардта в Matlab R2014a. В наборе данных из 30 групп 20 групп были выбраны случайным образом для обучения, 5 групп – для проверки, а остальные 5 групп – для тестирования.
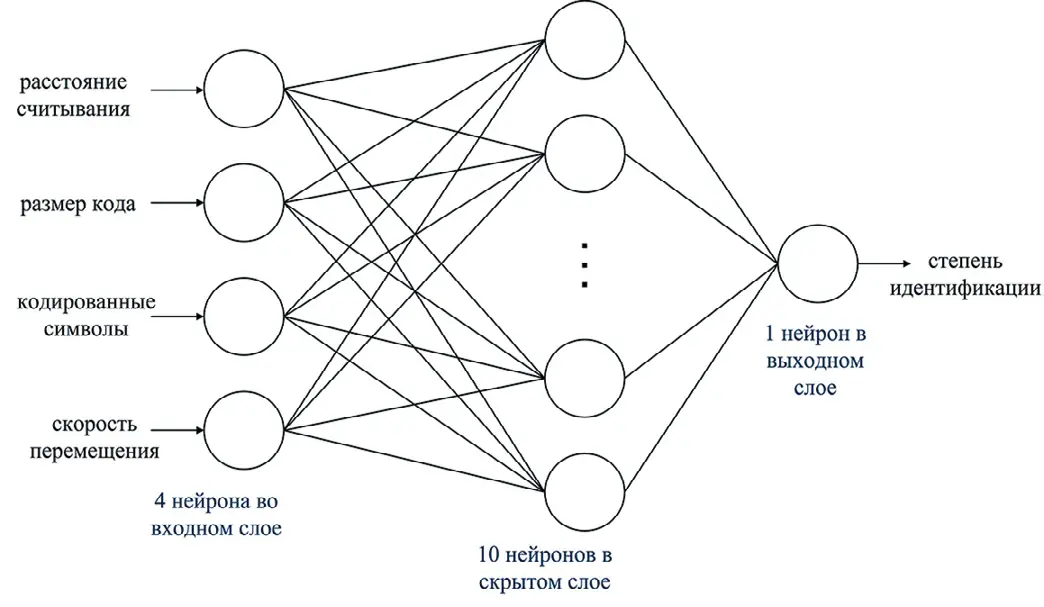 Рис. 3 Структура ANN для прогнозирования читаемости QR-кода (степень идентификации)
Рис. 3 Структура ANN для прогнозирования читаемости QR-кода (степень идентификации)
Fig. 3 The ANN structure for predicting the QR code readability (degree of identification)
Коэффициент детерминации R2 важен для описания взаимосвязи данных. Более высокое значение R2 указывает на хорошее соответствие прогнозируемой модели. Кроме R2, также необходима небольшая ошибка между фактическими и предсказанными данными. В данном исследовании для проверки соответствия двух методов использовались среднеквадратичная ошибка (RMSE) (уравнение (2)) и среднее процентное отклонение (APD) (уравнение (3)). RMSE и APD определяются следующим образом:
 (2)
(2)
 (3)
(3)
где N – количество экспериментальных групп; yp – прогнозируемое значение; ye – экспериментальное значение. R2 и RMSE для метода RSM составили 0,9329 и 9,5060 соответственно, в то время как для метода ANN данные показатели приняли следующие значения: 0,9021 и 15,0182.
С учетом двух значений оценки видно, что метод RSM прогнозирует точнее, чем метод ANN. Однако значение APD для RSM с 20,6790 выше, чем для ANN с 10,0124, что говорит о том, что метод ANN обладает хорошей точностью. Однако не по всем показателям оценки метод RSM превосходит метод ANN, но по основным параметрам метод RSM доминирует. Таким образом, можно утверждать, что использование метода RSM поспособствовало оптимизации степени идентификации QR-кода в состоянии движения.
Выводы
Таким образом, разработан и представлен метод оптимизации параметров программно-аппаратных средств систем удаленного мониторинга карьерных автосамосвалов на основе распознавания QR-кода с помощью метода поверхности отклика. В результате RSM-анализа экспериментальных исследований было установлено, что ключевыми факторами, влияющими на степень идентификации QR-кода, являются расстояние считывания, скорость движения, а также взаимосвязь между расстоянием считывания и размером QR-кода. Оптимальные параметры считывания программно-аппаратного комплекса контроля, определенные в рамках теоретических условий эксперимента с использованием программы DesignExpert, составили: расстояние считывания – 141,45 мм, размер кода – 34,58 мм, объем закодированных символов – 100 байт, скорость движения – 2,98 м/мин. При этом значении параметров среднее значение читаемости QR-кода составило 95%.
Экспериментальная проверка показывает, что использование предложенного метода оптимизации параметров влияющих факторов способно эффективно повысить степень идентификации QR-кода, тем самым обеспечить эффективность функционирования системы мониторинга на основе распознавания QR-кода.
В данном исследовании при оптимизации параметров программно-аппаратных средств, основанных на распознавании QR-кода в подвижном состоянии, использован метод RSM. Хоть RSM и является эффективным методом для получения оптимальных значений, он имеет некоторые перспективы для улучшения эффектов оптимизации. В будущей работе улучшение эффектов оптимизации будет изучаться в сочетании методов RSM и ANN. В связи с ограниченными условиями эксперимента исследована только закономерность влияния факторов на степень идентификации QR-кода в состоянии медленного движения, в то время как в реальных сценариях чаще встречается высокоскоростное движение. Необходимо разработать и протестировать синхронизированный считыватель, способный распознавать информационные идентификаторы (QR-коды), переносимые объектом управления, находящимся в состоянии высокоскоростного движения.
Список литературы
1. Onifade M., Adebisi J.A., Shivute A.P., Genc B. Challenges and applications of digital technology in the mineral industry. Resources Policy. 2023;85(B):103978. https://doi.org/10.1016/j.resourpol.2023.103978
2. Makarova I., Mavlyautdinova G., Mavrin V., Makarov D., Barinov A. Improving the environmental friendliness of the mining complex through alternative fuel for mine dump trucks. Transportation Research Procedia. 2023;68:755–760. https://doi.org/10.1016/j.trpro.2023.02.104
3. Сержан С.Л., Скребнев В.И., Малеванный Д.В. Исследование влияния шероховатости стальных и полимерных труб на потери напора при гидротранспорте хвостовой пульпы. Обогащение руд. 2023;(4):41–49. https://doi.org/10.17580/or.2023.04.08 Serzhan S.L., Skrebnev V.I., Malevanny D.V. Study of the effects of steel and polymer pipe roughness on the pressure loss in tailings slurry hydrotransport. Obogashchenie Rud. 2023;(4):41–49. (In Russ.) https://doi.org/10.17580/or.2023.04.08
4. Земенкова М.Ю., Чижевская Е.Л., Земенков Ю.Д. Интеллектуальный мониторинг состояний объектов трубопроводного транспорта углеводородов с применением нейросетевых технологий. Записки Горного института. 2022;258:933– 944. https://doi.org/10.31897/PMI.2022.105 Zemenkova M.Y., Chizhevskaya E.L., Zemenkov Y.D. Intelligent monitoring of the condition of hydrocarbon pipeline transport facilities using neural network technologies. Journal of Mining Institute. 2022;258:933–944. https://doi.org/10.31897/PMI.2022.105
5. Сафиуллин Р. Н., Сафиуллин Р. Р., Ефремова В. А. Метод комплексной оценки бортовых информационно-управляющих систем на горных машинах. Горный информационно-аналитический бюллетень. 2023;(9-1):49–63. https://doi.org/10.25018/0236_1493_2023_91_0_49 Safiullin R. N., Safiullin R. R., Efremova V. A. Method of complex assessment of on-board information and control systems on mining machines. Mining Informational and Analytical Bulletin. 2023;(9-1):49–63. https://doi.org/10.25018/0236_1493_2023_91_0_49
6. Назарычев А.Н., Дяченок Г.В., Сычев Ю.А. Исследование надежности тягового электропривода карьерных самосвалов на основе анализа отказов его функциональных узлов. Записки Горного института. 2023;261:363–373. Режим доступа: https://pmi.spmi.ru/pmi/article/view/16189 (дата обращения: 23.12.2024). Nazarychev A.N., Dyachenok G.V., Sychev Y.A. A reliability study of the traction drive system in haul trucks based on failure analysis of their functional parts. Journal of Mining Institute. 2023;261:363–373. Available at: https://pmi.spmi.ru/pmi/article/view/16189 (accessed: 23.12.2024).
7. Козярук А.Е., Камышьян А.М. Повышение энергетической эффективности электромеханической трансмиссии карьерного автосамосвала. Записки Горного института. 2019;239:576–582. https://doi.org/10.31897/PMI.2019.5.576 Kozyaruk A.E., Kamyshyan A.M. Improving the energy efficiency of the electromechanical transmission of an open-pit dump truck. Journal of Mining Institute. 2019;239:576–582. https://doi.org/10.31897/PMI.2019.5.576
8. Efimov I., Gabdulkhakov R.R., Rudko V.A. Fine-tuned convolutional neural network as a tool for automatic microstructure analysis of petroleum and pitch cokes. Fuel. 2024;376:132725 https://doi.org/10.1016/j.fuel.2024.132725
9. Курганов В.М., Грязнов М.В., Колобанов С.В. Оценка надежности функционирования экскаваторно-автомобильных комплексов в карьере. Записки Горного института. 2020;241:10–21. https://doi.org/10.31897/pmi.2020.1.10 Kurganov V.M., Gryaznov M.V., Kolobanov S.V. Assessment of operational reliability of quarry excavator-dump truck complexes. Journal of Mining Institute. 2020;241:10–21. https://doi.org/10.31897/pmi.2020.1.10
10. Гендлер С.Г., Братских А.С. Актуальные проблемы возгорания угольных скоплений в породных отвалах. Горная промышленность. 2024;(5S):71–77. https://doi.org/10.30686/1609-9192-2024-5S-71-77 Gendler S.G., Bratskih A.S. Actual problems of coal accumulations ignition in rock dumps. Russian Mining Industry. 2024;(5S):71–77. (In Russ.) https://doi.org/10.30686/1609-9192-2024-5S-71-77
11. Safiullin R.N., Safiullin R.R., Sorokin K.V., Kuzmin K.A., Rudko V.A. Integral assessment of influence mechanism of heavy particle generator on hydrocarbon composition of vehicles motor fuel. International Journal of Engineering. 2024;37(8):1700– 1706. https://doi.org/10.5829/ije.2024.37.08b.20
12. Сафиуллин Р.Н., Сафиуллин Р.Р., Унгефук А.А., Сорокин К.В., Тянь Х. Автоматизированная система удаленной диагностики технического состояния транспортных средств на основе матричного QR-кода. Патент RU2792386C1. Заявл. 24.01.2023, опубл. 21.03.2023. Режим доступа: https://patents.google.com/patent/RU2792386C1/ru (дата обращения: 23.12.2024).
13. Бузмаков С.А., Санников П.Ю., Кучин Л.С., Игошева Е.А., Абдулманова И.Ф. Применение беспилотной аэрофотосъемки для диагностики техногенной трансформации природной среды при эксплуатации нефтяного месторождения. Записки Горного института. 2023;260:180–193. https://doi.org/10.31897/pmi.2023.22 Buzmakov S.A., Sannikov P.Y., Kuchin L.S., Igoscheva E.A., Abdulmanova I.F. The use of unmanned aerial photography for interpreting the technogenic transformation of the natural environment during the oilfield operation. Journal of Mining Institute. 2023;260:180–193. https://doi.org/10.31897/pmi.2023.22
14. Zhang L., Orosz G. Beyond-Line-of-Sight Identification by Using Vehicle-to-Vehicle Communication. IEEE Transactions on Intelligent Transportation Systems. 2018;19(6):1962–1972. https://doi.org/10.1109/TITS.2017.2747582
15. Vasilev B.Yu., Nguyen T.H. Stochastic pulse-width modulation and modification of direct torque control based on a threelevel neutral-point clamped inverter. Energies. 2024;17(23):6017. https://doi.org/10.3390/en17236017
16. Tian Y., Palaev A.G, Shammazov I.A, Ren Y. Non-destructive testing technology for corrosion wall thickness reduction defects in pipelines based on electromagnetic ultrasound. Frontiers in Earth Science. 2024;12:1432043. https://doi.org/10.3389/feart.2024.1432043
17. Сержан С.Л., Малеванный Д.В. Современное состояние и перспективы развития технологий подъема для комплексов добычи глубоководных твердых полезных ископаемых. Горный информационно-аналитический бюллетень. 2024;(12-1):107–128. https://doi.org/10.25018/0236_1493_2024_121_0_107 Serzhan S.L., Malevannyj D.V. Lifting technologies for deep-sea solid mineral extraction facilities: current situation and prospects. Mining Informational and Analytical Bulletin. 2024;(12-1):107–128. (In Russ.) https://doi.org/10.25018/0236_1493_2024_121_0_107
18. Ge S., Wang F.-Y., Yang J., Ding Z., Wang X., Li Y. et al. Making standards for smart mining operations: intelligent vehicles for autonomous mining transportation. IEEE Transactions on Intelligent Vehicles. 2022;7(3):413–416. https://doi.org/10.1109/TIV.2022.3197820
19. Iradukunda Y., Ciza I., Ndayisaba S., Nyambo D., Michael K.F. Development of QR-code based interactive dynamic billboard system with motion detection. International Journal of Advances in Scientific Research and Engineering. 2021;7(9):18–27. https://doi.org/10.31695/IJASRE.2021.34074
20. Ustinov D.A., Abou Rashid A. Using artificial neural network methods to increase the sensitivity of distance protection. International Journal of Engineering. 2024;37(11):2192–2199. https://doi.org/10.5829/ije.2024.37.11b.06










